Sensor device RTCs
Kinectセンサーから全身(head, neck, shoulder, elbow, hand, torso, hip, knee, foot)の位置を取得し、アウトポートから出力するコンポーネントです。
Stage(ステージ)ロボットシミュレータコンポーネントです。2次元シミュレータで異同ロボットの実験ができます。一つのシミュレータで複数のロボットが使えます。
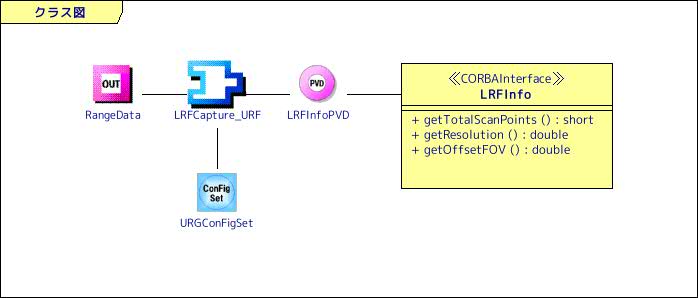
北陽電気のレーザーセンサー用のRTコンポーネントです。URG-04LX (Classic-URG)、UHG-08LX (Hi-URG)、UTM-30LX (Top-URG)、UXM-30LX/UXM-30LX-E (Tough-URG)を含めてすべての北陽電気のセンサーを対応します。
リアルタイムが可能性です。通信遅延のキャリブレーションを使って、正確なタイムスタンプを出します。
バイナリインストーラーとソースはここからダウンロードできます。 Flexiportライブラリ も HokuyoAISTライブラリ もインストールすることが必要です。
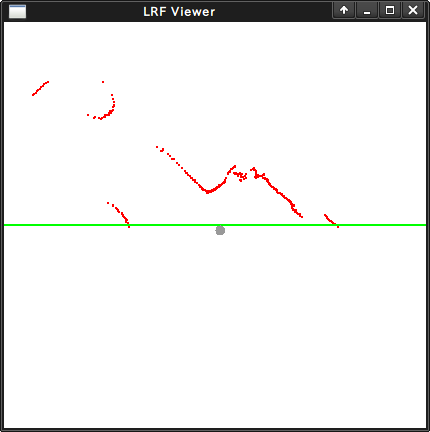
これはLRF描画コンポーネントです。 LRFキャプチャRTCからの距離データを受け取り描画を行います。
奈良先端科学技術大学院大学 情報科学研究科 robotics-staff@is.naist.jp 〒630-0192 奈良県 生駒市 高山町 8916-5 Tel: 0743-72-5376, Fax: 0743-72-5379
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
RT_Kinect_UserTracking
概要
Kinectセンサーから全身(head, neck, shoulder, elbow, hand, torso, hip, knee, foot)の位置を取得し、アウトポートから出力するコンポーネントです。