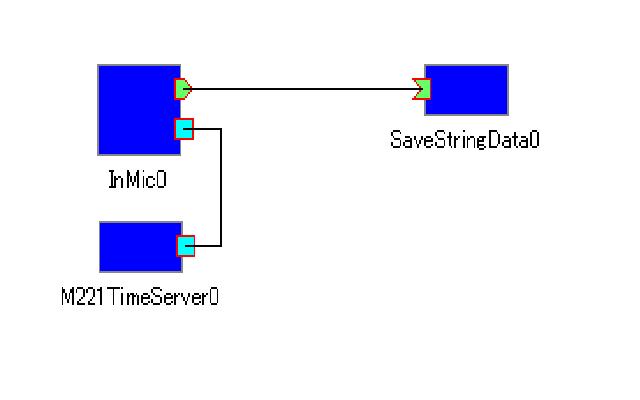
音声入力コンポーネントは、マイクより入力された音声データに、 時間情報を付加して出力します。
修正BSDライセンスを適用しています。
株式会社イーガー 新規事業開発部 kubota@mail.eager.co.jp 〒530-0047 大阪府大阪市北区西天満4-14-3 住友生命御堂筋ビル17F Tel: 06-6360-2050, Fax: 06-6360-2051
OpenHRIは、音声認識・音声合成・対話制御など、ロボットのコミュニケーション機能の実現に必要な各要素を実現するコンポーネント群です。 フリーで利用できる各オープンソースソフトウェアを使い易いコンポーネントとしてまとめました。
http://openhri.net/
OpenHRIのライセンスは、Eclipse Public License (EPL)です。 http://www.eclipse.org/legal/epl-v10.html EPLは、コードの改変や再配布、営利利用を許可するオープンソースライセンスですが、場合によっては改変内容をライセンス元に開示する必要があります。 OpenHRIが内部で用いているJuliusやOpen JTalkなどのそれぞれのソフトウェアについては、各自のライセンスに従います。
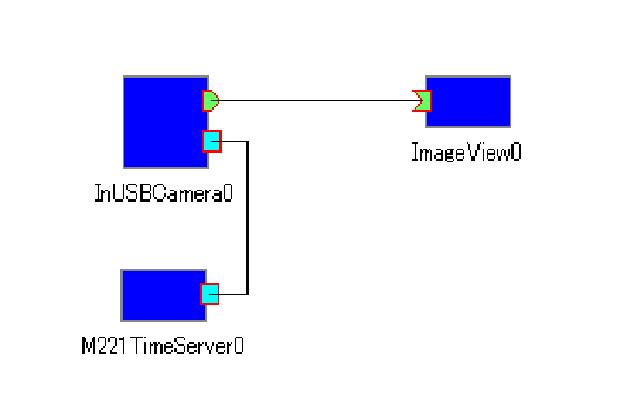
視覚入力コンポーネントは、USBカメラより画像を取得し、取得時間情報を付加して出力します。
下記ライブラリを使用しています。 ●DirectX SDK August 2007 ●Windows SDK Ver.6.0 ●OpenCV2.1(テストコンポーネントにて使用)
本ツールは、ロボットの実時間制御用に利用するRTC群について、
事を目的としている。 Eclipse Pluginとして実装されており、弊社updateサイトからダウンロード可能である。 コンポーネント毎の実行時間計測機能を有する実行コンテキストの利用を前提としており、双腕ロボットHIRO、HIRONX向けに弊社から配布中の制御システムのみに対応している。
入手方法・利用方法: https://www.generalrobotix.com/support/public/realtimesystemconfigurator.html
ステレオカメラを利用し、指定された作業対象物の検出結果(3次元位置・姿勢)を共通形式で出力するモジュール群です。
オープンソース版作業対象認識モジュール群 座標系変換ツール「OpenVGRextra」 オープンソース版作業対象認識モジュール群に付加して使用するツールです。 認識結果の座標系を変換するために利用します。
オープンソース版作業対象認識モジュール群に付加して使用するツールです。 認識結果の座標系を変換するために利用します。
オープンソース版作業対象認識モジュール群「OpenVGR」 ステレオカメラを利用し、指定された作業対象物の検出結果(3次元位置・姿勢)を 共通形式で出力するモジュール群です。
※ OpenINVENTの開発は、ver4.0.0をもって終了いたしました。
車輪型移動ロボットが自律的に目的地まで移動できるためには、目的地までの経路を計画し、その経路にそって走行するために車輪の回転を制御し、センサを使って周囲の状況を観測し、自身がどこにいるのかを推定するなどの機能をもつRTC群です。
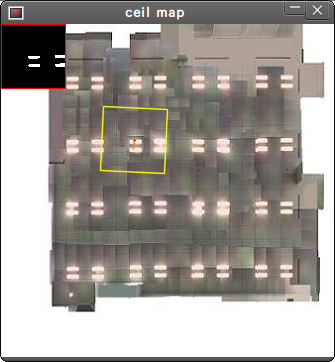
本プログラムはロボットから見える画像と、天井地図のマッチングを常に取ることで自己位置を推定するRTコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 2.0.0
商用以外の利用の場合、BSDライセンスが適用されます。 商用利用の際には、個別に使用条件を検討させて頂きます。 詳しくは、ご連絡をお願い致します。
奈良先端科学技術大学院大学 情報科学研究科 robotics-staff@is.naist.jp 〒630-0192 奈良県 生駒市 高山町 8916-5 Tel: 0743-72-5376, Fax: 0743-72-5379
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク



アピアランスベース物体位置・姿勢推定コンポーネント(CPU版)
概要
本コンポーネントは予め取得した画像をモデルとして,アピアランスベースの任意物体の検出及び位置・姿勢の推定を行う。SIFT特徴を用いることで,
日常環境における照明条件の変化や物体の見え方におけるスケール変化,
回転変化に強固な物体検出を実現する。
注意事項
下記ライブラリを使用しています。●OpenCV 1.1
ライセンス
修正BSDライセンスを適用しています。詳しくは、ご連絡をお願い致します。
連絡先
国立大学法人 大阪大学 大学院基礎工学研究科k-oohara@arai-lab.sys.es.osaka-u.ac.jp
〒560-8531 大阪府豊中市待兼山町1-3
Tel: 06-6850-6368, Fax: 06-6850-6341