
ダウンロード
最新バージョン : 2.0.2-RELESE
| 2.0.2-RELESE | ダウンロードページ |
OpenRTM@Github
OpenRTM-aist GitHubサイト
ROS
Robot Operating System
Choreonoid
モーションエディタ/シミュレータ
DAQ-Middleware
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
産総研が提供するRTC集
東京オープンソースロボティクス協会
| 2.0.2-RELESE | ダウンロードページ |
OpenRTM-aist GitHubサイト
Robot Operating System
モーションエディタ/シミュレータ
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
産総研が提供するRTC集
東京オープンソースロボティクス協会
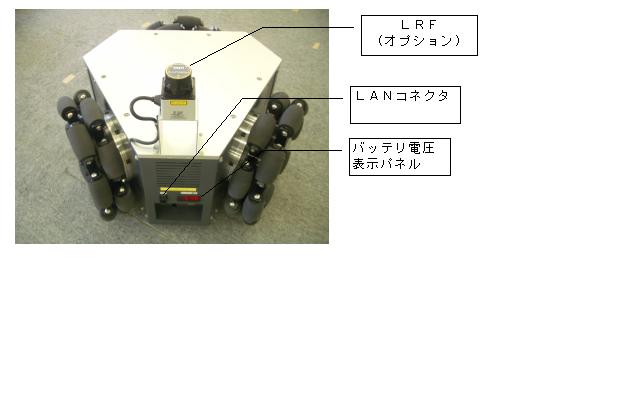
SegwayRMP制御RTC(オープンソース)
概要
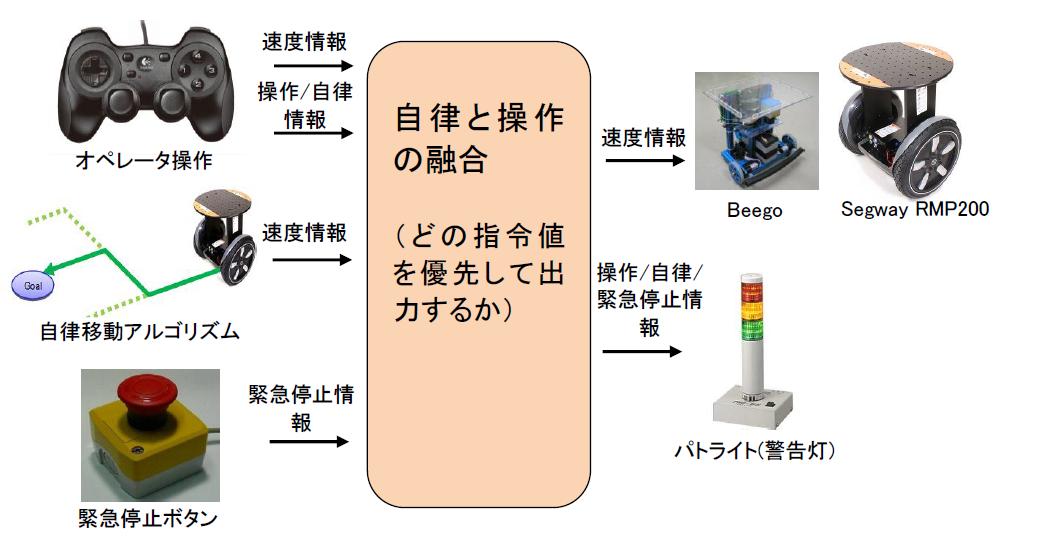
SegwayRMP 向けの台車モジュールです。速度指示値に対する台車ハードウェアへの速度指示や、制御結果
の速度の出力、台車固有のステータスの出力を行います。
ライセンス
商用以外の利用の場合、修正BSDライセンスが適用されます。商用利用の際には、個別に使用条件を検討させて頂きます。
詳しくは、ご連絡をお願い致します。
連絡先
セグウェイジャパン株式会社E-MAIL robot@segway-japan.co.jp
TEL 045-263-6151
Download