本モジュールは、入力された画像に対してBagOfKeypoints法を使用し、 作業対象物を認識し、認識した対象物と確度を出力するモジュールです。
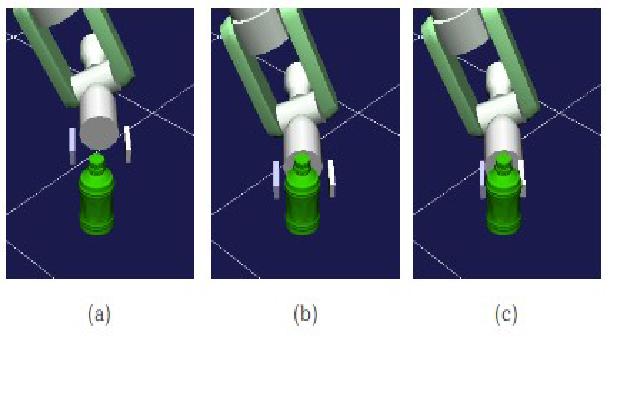
シュンク・ジャパン(旧高野ベアリング)社製電動ハンドRH707 を 制御するRTC(動作確認用RTC付き)です。
下記ライブラリを使用しています。 ●ライフロボティクス社製RH707ハンド用コントローラRH700C3制御 ライブラリ(商用)
EPLライセンスを適用しています。
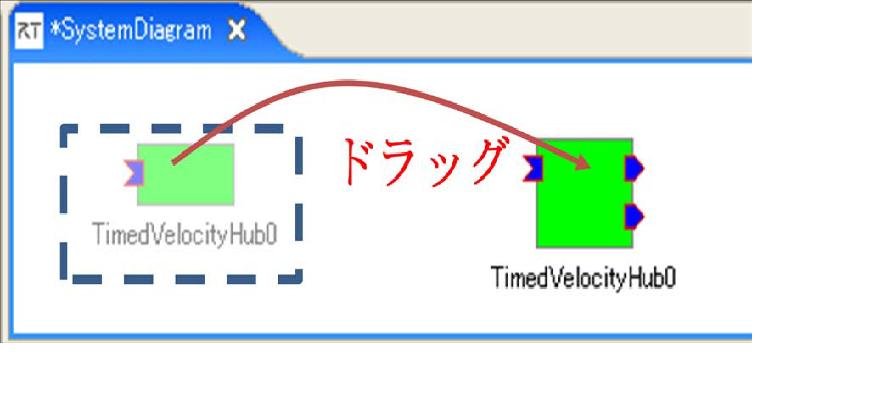
このコンポーネントはTimed Velocity データを複数に分岐するコンポー ネントです。
修正BSDライセンスを適用しています。
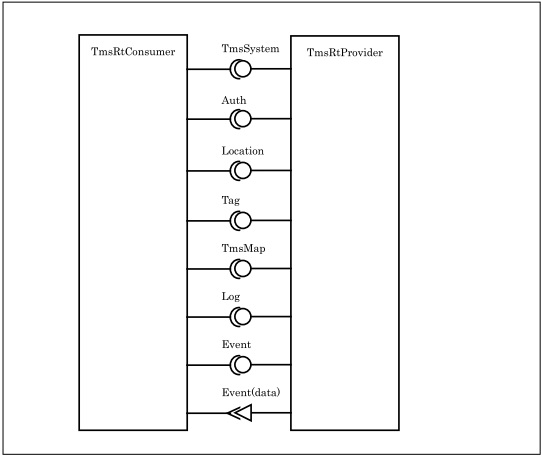
●利用にはタウンマネジメントシステムが必要です。コンポーネントに同梱しております。
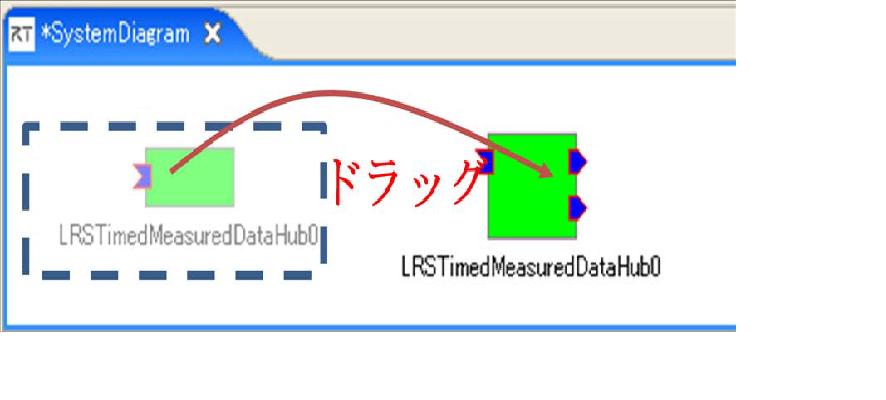
このコンポーネントはLRS Timed Measured Data データを複数に分岐する コンポーネントです。
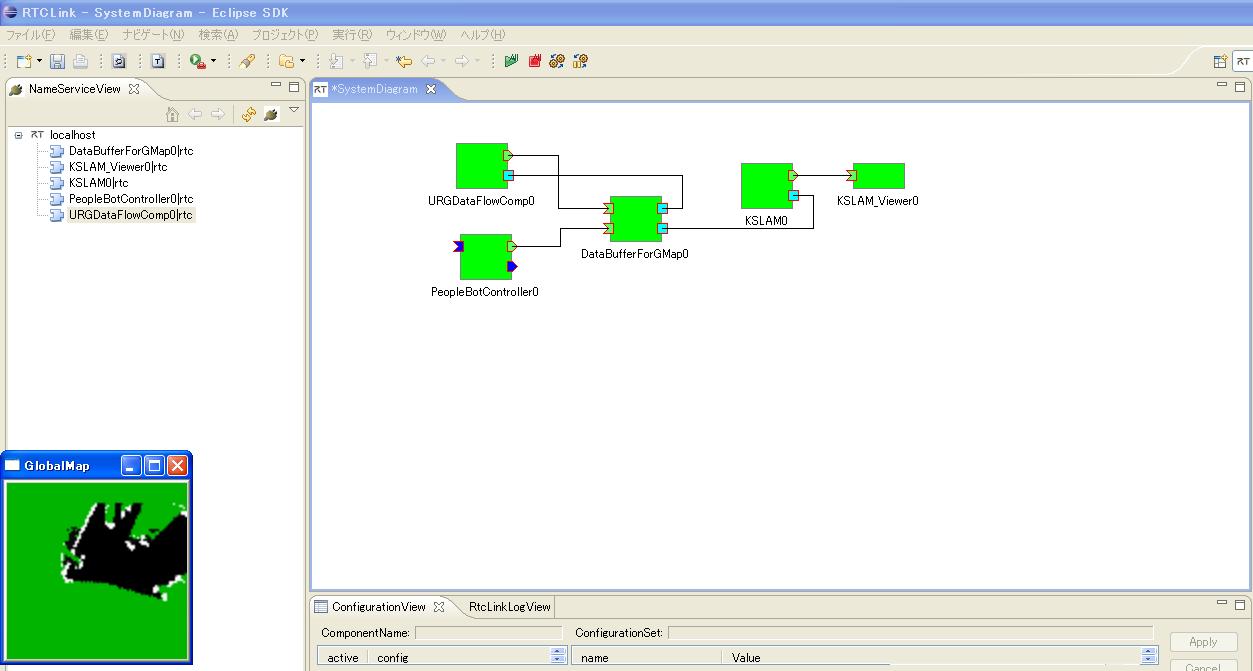
このコンポーネントは、独自手法の大域地図の生成・表示を行うコンポーネント群です。
下記ライブラリを使用しています。 ●OpenRTM1.0.0用では、OpenCV 2.1 ●OpenRTM0.4.x用では、OpenCV 1.0
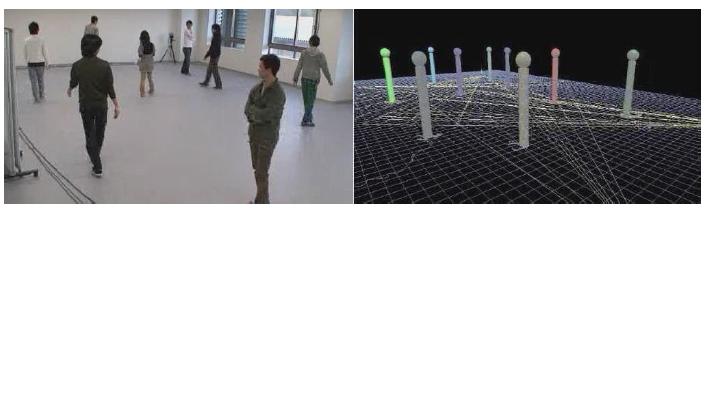
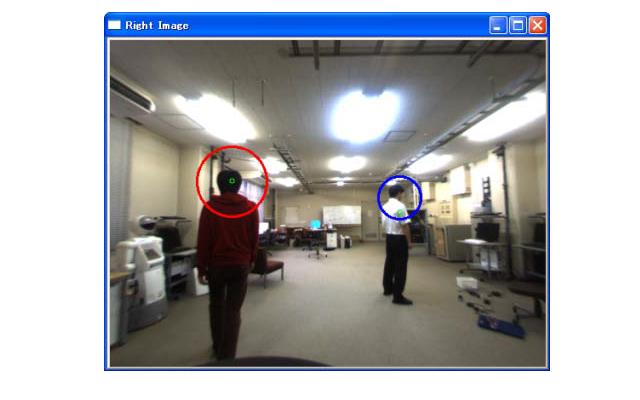
このコンポーネントはステレオカメラ(Bumblebee 2)の情報から人物を 検出し,それぞれの人物の位置と移動速度を出力するコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 1.0.0 ●FlyCapture (配布元:http://www.ptgrey.com/) ●Triclops(配布元:http://www.ptgrey.com/))
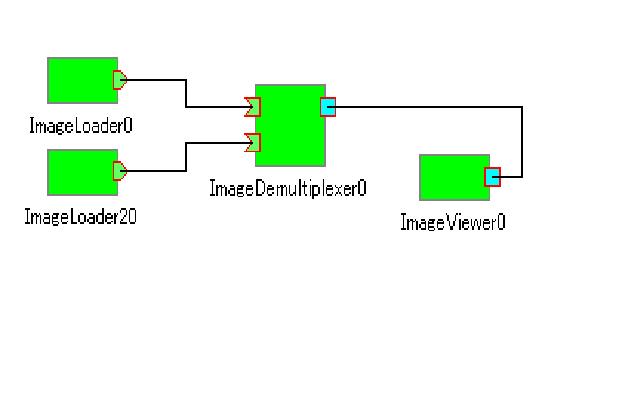
画像をJPEGに変換して転送したり,JPEG画像やOpenCV画像を表示 したりするコンポーネント群です。
下記ライブラリを使用しています。 ●OpenCV 1.0.0 ●JPEG変換にIJGのライブラリ
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

作業対象物認識モジュール
概要
本モジュールは、入力された画像に対してBagOfKeypoints法を使用し、
作業対象物を認識し、認識した対象物と確度を出力するモジュールです。