本研究ではエンターテインメント用途のロボットの中でも,音とアニメーションが同調することで人を楽しませる,いわゆる「オーディオ・アニマトロニクス」で利用するためのRTコンポーネント群を作成する. 作成したRTコンポーネントは「スクリプト制御」「音声合成」「サーボ制御」の3つから構成され,組み合わせによってスクリプトに沿ったオーディオ・アニマトロニクスの発話とアニメーションの処理を簡単に実装できる.
https://github.com/thorikawa/rtc-script-reader
https://github.com/thorikawa/rtc-johnny-five
https://github.com/thorikawa/rtc-rospeex
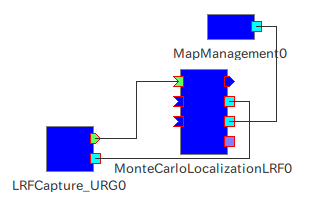
本プログラムは、LRF距離データ,オドメトリ情報を取得し,地図とのマッチングを行うことで 自己位置を推定するRTコンポーネントです。
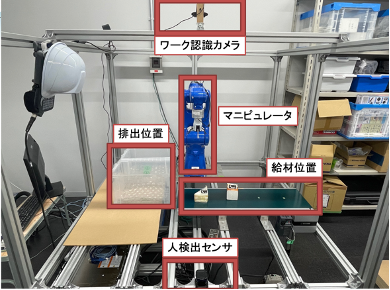
ロボットマニピュレータを安全に稼動させる上で,事前にシミュレータを用いて動作検証を行うことは重要である. 本コンポーネントはシミュレータを用いた動作検証を支援する.
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


オーディオ・アニマトロニクスのためのRTコンポーネント
概要
本研究ではエンターテインメント用途のロボットの中でも,音とアニメーションが同調することで人を楽しませる,いわゆる「オーディオ・アニマトロニクス」で利用するためのRTコンポーネント群を作成する.
作成したRTコンポーネントは「スクリプト制御」「音声合成」「サーボ制御」の3つから構成され,組み合わせによってスクリプトに沿ったオーディオ・アニマトロニクスの発話とアニメーションの処理を簡単に実装できる.
ソースコード
スクリプト制御
https://github.com/thorikawa/rtc-script-reader
サーボ制御
https://github.com/thorikawa/rtc-johnny-five
音声合成
https://github.com/thorikawa/rtc-rospeex
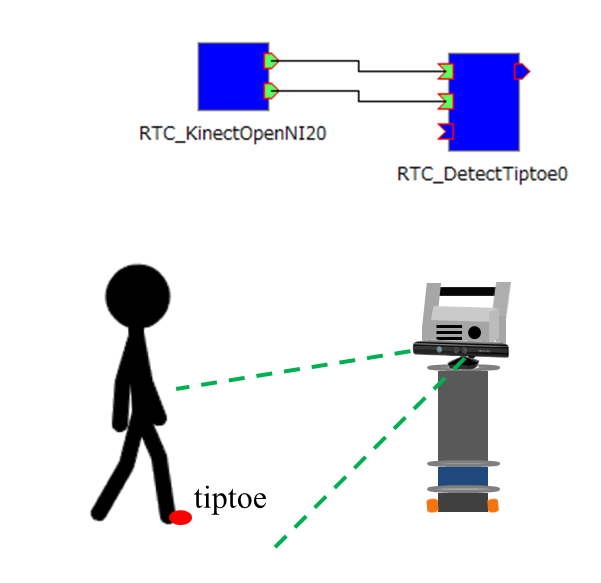
システム構成