発表資料のpdf、及び、モデル発表動画は こちらのページ をご覧下さい。
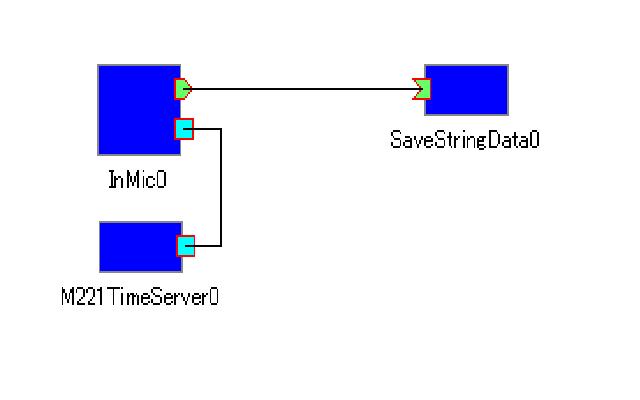
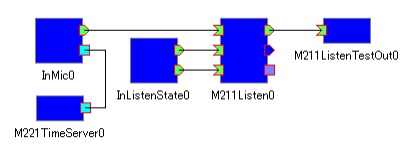
音声入力コンポーネントは、マイクより入力された音声データに、 時間情報を付加して出力します。
修正BSDライセンスを適用しています。
株式会社イーガー 新規事業開発部 kubota@mail.eager.co.jp 〒530-0047 大阪府大阪市北区西天満4-14-3 住友生命御堂筋ビル17F Tel: 06-6360-2050, Fax: 06-6360-2051
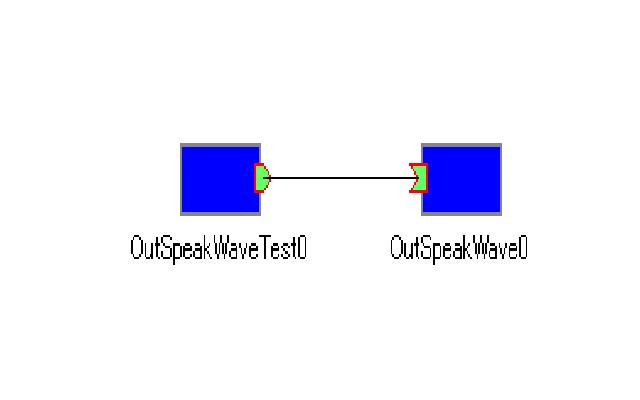
音声出力コンポーネントは、入力された音素情報を含んだ音声波形データファイルより音声データを抽出し、 出力します。
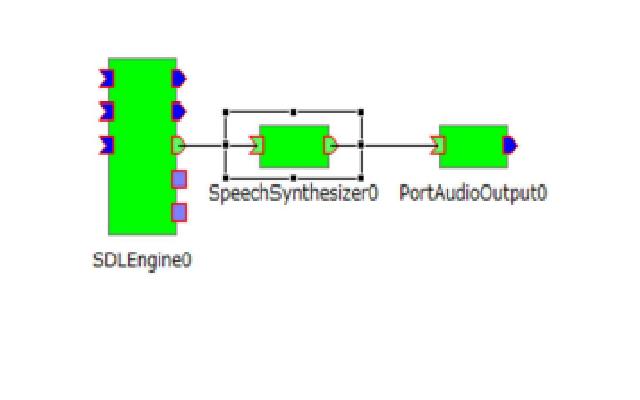
音声合成コンポーネントは入力された文字列から 音声波形ファイルを生成し、出力します。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しくは、下記までご連絡をお願い致します。
株式会社イーガー 新規事業開発部 次世代ロボット知能化プロジェクト(担当:窪田) 〒530-0047 大阪府大阪市北区西天満4-14-3 住友生命御堂筋ビル17F Tel : 06-6360-2050 Fax : 06-6360-2051 E-mail: kubota@mail.eager.co.jp
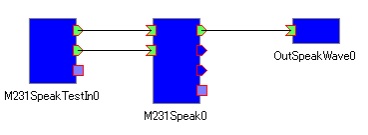
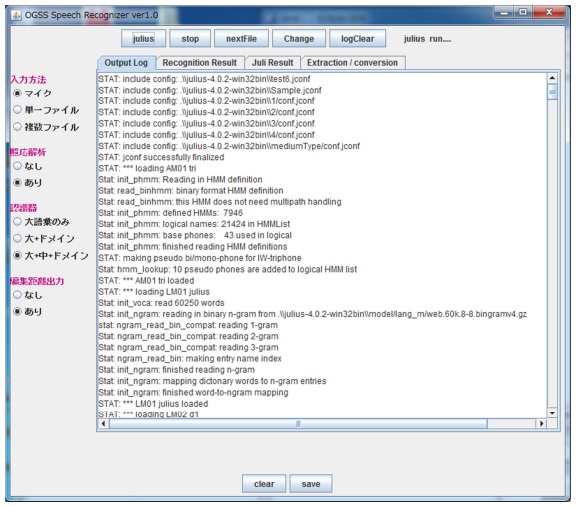
音声認識コンポーネントは入力された音声波形データを認識し 文字列で発話内容を出力します。
本システムは双腕ロボットを用いて工場での部品整理をイメージしたサービスを行うシステムである。 具体的には、作業台に置かれた部品を状況に応じて再配置し、個々の部品を検出して 双腕を活かして箱に整理して入れ、双腕で別の場所に運ぶPick&Place作業を行うものである。 システムソフトウェアは頭部ステレオカメラによる部品認識・双腕ロボットでの作業計画・ロボット動作を 行うための RTC 群で構成される。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

集荷ロボット
概要
特徴
仕様
コンポーネント群
新規作成
再利用
ソースコード
発表資料のpdf、及び、モデル発表動画は こちらのページ をご覧下さい。