レイアウト地図とランドマーク地図を利用した自己位置推定モジュール群です。 富士通九州ネットワークテクノロジーズより販売している 「ステレオビジョンモジュール」とWindows PCが必要です。
ステレオビジョンモジュール購入者に無償提供致します。 下記URLのステレオビジョンモジュール ソフトウェア提供依頼フォームよりご依頼ください。
OpenRTM-aist において定義されるあらゆるデータ型に接続することができるコンポーネントを実現するための基底クラスをオープンスースで公開します。
障害物情報から衝突を判定するコンポーネントです。
- CollisionDetection 障害物検知RTC (OpenRTM-aist 1.0.0-RC1 C++)
・インターフェース等は今後インターフェースの共通化作業に伴い変更される可能性があります。
BSDライセンス
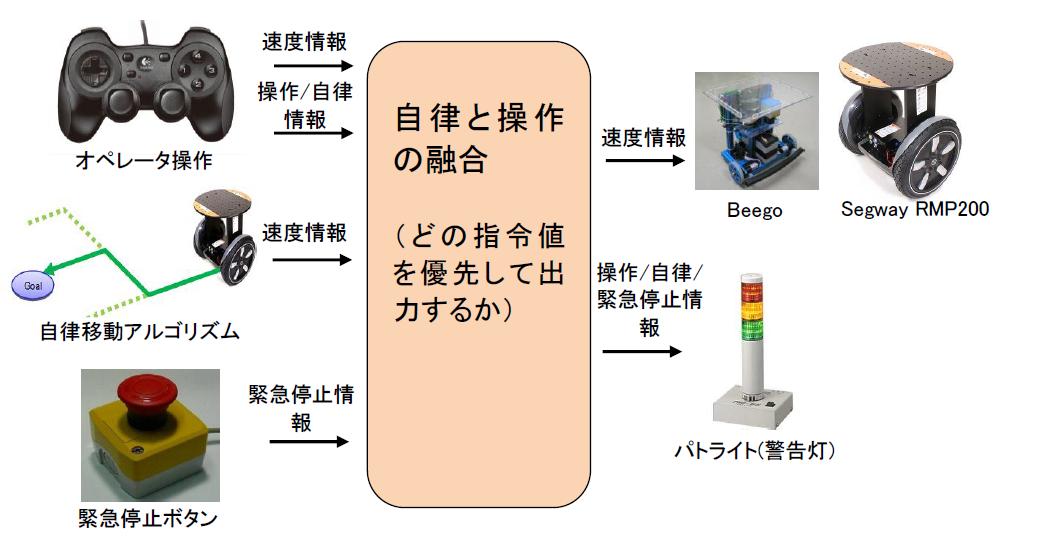
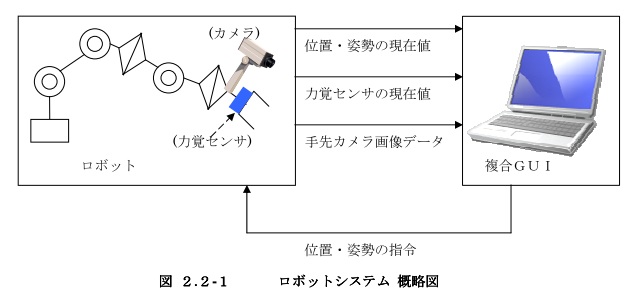
MultiGUI_RTCは複合情報GUIモジュールです。 ロボットの動作状態の適切な可視化によって,教示作業,特に設備や組立部品の 現物に合わせて追加・修正する作業パスの精密化作業の効率化を図ります。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しい内容については、下記へご連絡願います。
三菱電機株式会社 先端技術総合研究所 業務部 技術情報課 http://www.MitsubishiElectric.co.jp/corporate/randd/inquiry/index_at.html お問い合わせ窓口) ATC_webmaster@ra.MitsubishiElectric.co.jp
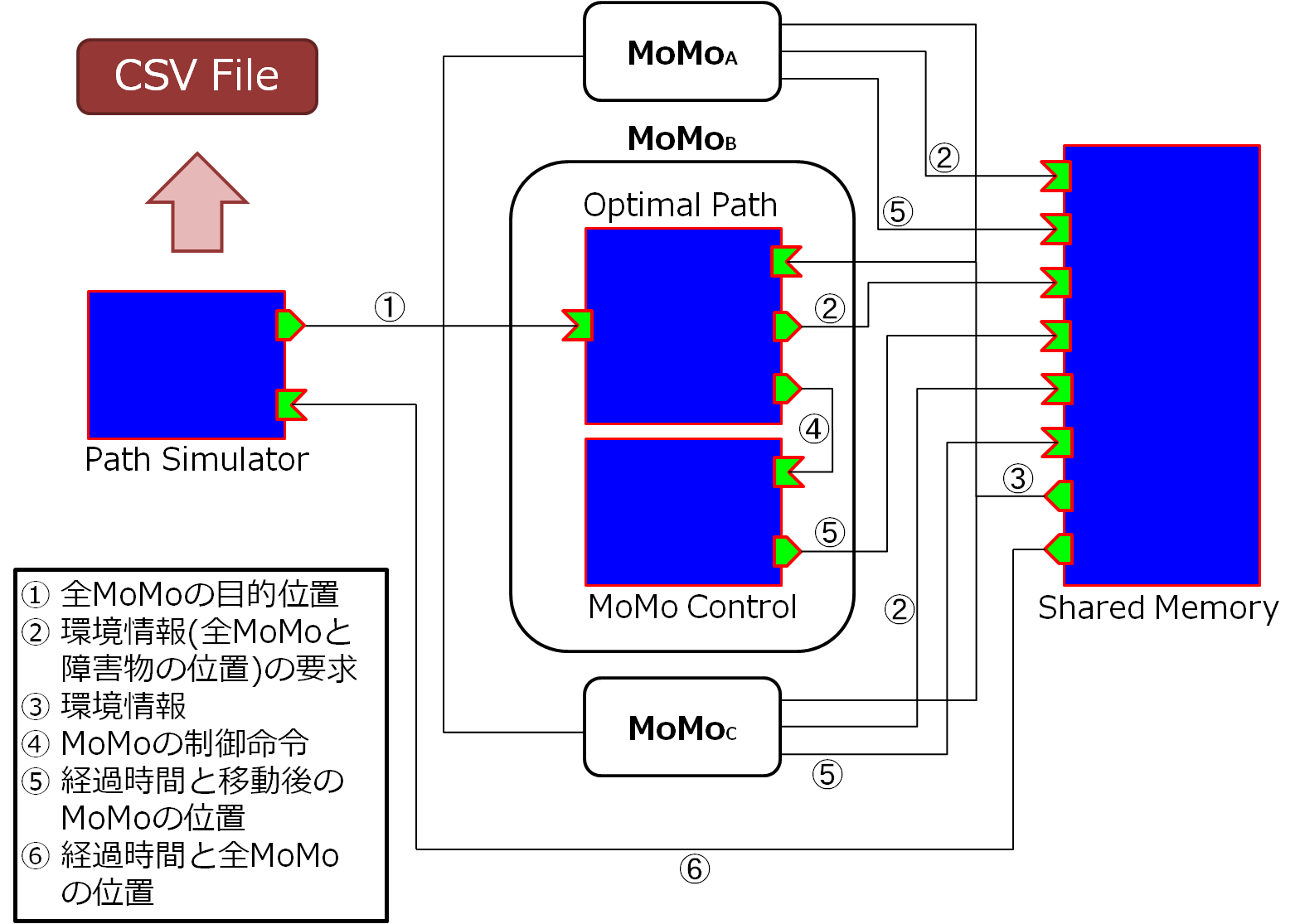
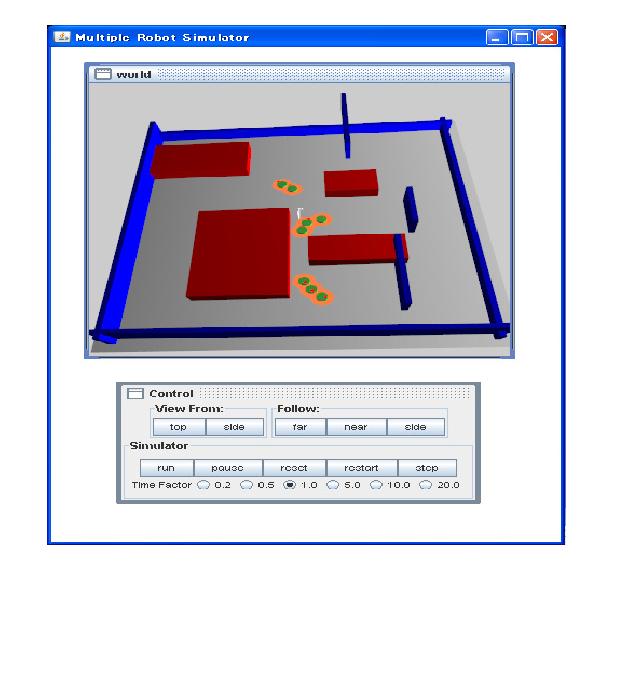
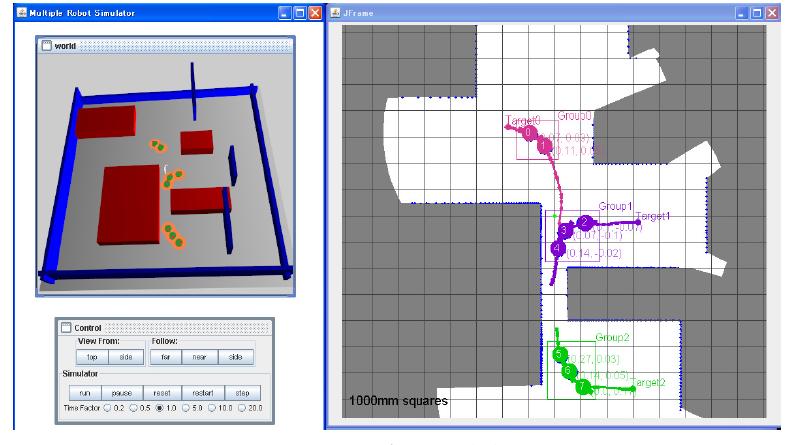
複数台の移動ロボットを対象とした経路計画法が数多く研究されている.これらの経路計画法を実環境において移動ロボットで用いる上で,事前にシミュレーション環境内での検証を行うことは必要不可欠である.そこで本コンポーネントは,複数台の移動ロボットを対象とした経路計画法の検証を支援する.
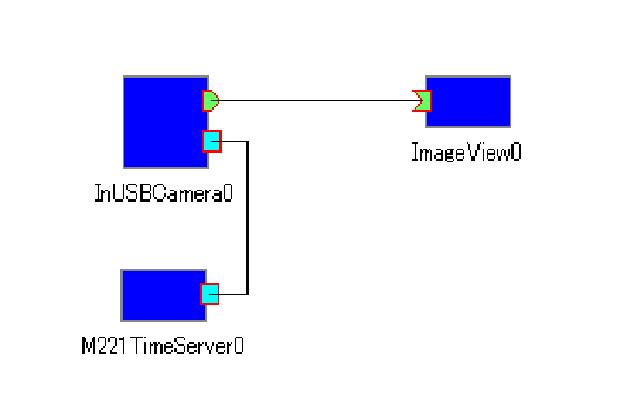
視覚入力コンポーネントは、USBカメラより画像を取得し、取得時間情報を付加して出力します。
下記ライブラリを使用しています。 ●DirectX SDK August 2007 ●Windows SDK Ver.6.0 ●OpenCV2.1(テストコンポーネントにて使用)
修正BSDライセンスを適用しています。
株式会社イーガー 新規事業開発部 kubota@mail.eager.co.jp 〒530-0047 大阪府大阪市北区西天満4-14-3 住友生命御堂筋ビル17F Tel: 06-6360-2050, Fax: 06-6360-2051
センサやアクチュエータをRTCとしてモジュール化し,それらを組み合わせ方や,統合するモジュールのプログラムを学習する教材を開発した.ロボットアームは,ROBOTIS社のアクチュエータDynamixelで構成されたものを想定している.また,センサは,深度カメラと触覚センサを想定している.Dynamixel汎用のRTCと深度カメラから3次元点群データを出力するRTCは,著者らの研究室がGitHubで公開しているものを再利用する.触覚センサとしてFingerVisionを導入し,そのためのRTCを新たに開発した.また,初学者でもセンサやアームの入出力を使いやすくなるように中継役のRTCを用意した.
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

自己位置推定RTC群
概要
レイアウト地図とランドマーク地図を利用した自己位置推定モジュール群です。
富士通九州ネットワークテクノロジーズより販売している
「ステレオビジョンモジュール」とWindows PCが必要です。
ライセンス
ステレオビジョンモジュール購入者に無償提供致します。 下記URLのステレオビジョンモジュール ソフトウェア提供依頼フォームよりご依頼ください。