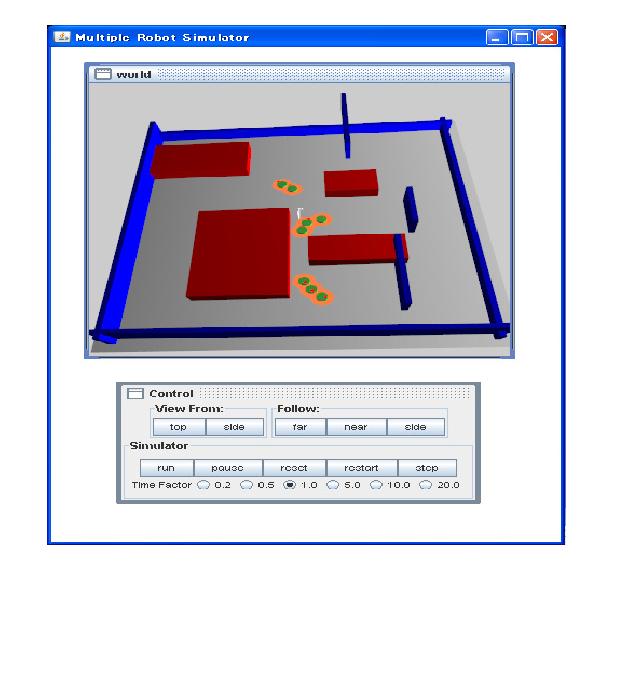
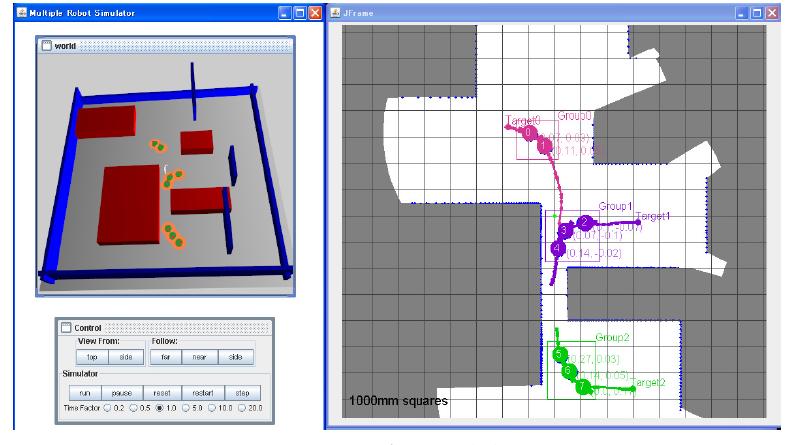
本コンポーネントは,特徴点群の3次元フロー認識とモーションセンサ(IMU)の認識の組み合わせにより, 自分自身の位置や回転量を推定しながら,特徴点群をラベリングして他者の位置や移動判定をする コンポーネント群です。
修正BSDライセンスに基づき配布されます。 詳しくは、LICENSE.txtファイルをご覧ください。
●本コンポーネントの動作には、EusLisp用RTMインタフェースrtmeusが必要です。 つぎのところからダウンロード、インストールしてください。 http://code.google.com/p/rtmeus/
東京大学 知能機械情報学専攻 情報システム工学研究室 itngr@jsk.t.u-tokyo.ac.jp
下記ソフトウェアを使用しています。 ●ZBar-0.10 ●ARToolKitPlus-2.1.5 ●OpenCV-2.0
本プログラムはステレオカメラからの情報を基にした対人追従コンポーネントです。 ColorImageウィンドウには入力された画像が表示されます。 Enterキーを入力することでウィンドウの画像が固定されます。 画像を固定した状態で,マウスドラッグ(左クリック)で追跡対象者の領域を選択することで ロボットのローカル座標系での対象の位置を出力します。 選択された領域はtempウィンドウに表示されます。 入力画像のサイズは320x240pixelです。 出力の型は自己定義のTimedXYDouble,TimedOdometryなどを使用しています。 ご利用の際はご注意ください。
修正BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
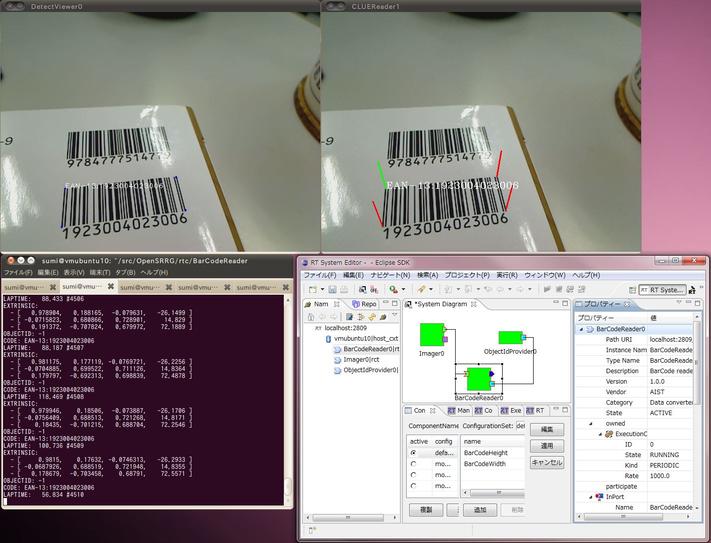
ARToolKitPlusマーカを読み取り、そのIDと位置姿勢(6DOF)を返します。 入力ポートのデータ型はImg::TimedCameraImage 出力ポートのデータ型は要素数20のRTC::TimedDoubleSeqです。
LGPL+個別ライセンスのデュアルライセンス。
ただいま、準備中。しばらくお待ちください。
独立行政法人 産業技術総合研究所 知能システム研究部門 サービスロボティクス研究グループ 〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二 Tel/Fax:029-861-3427/029-862-3493 email: srrg@m.aist.go.jp
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
人物追跡モジュール
概要
本知能モジュールは、複数のレーザレンジファインダを用いて人物追跡を行い、その結果をサービスポートで出力します。
出力する形式は九州大学で開発しているタウンマネジメントシステムと
互換性があります。
注意事項
下記ライブラリ、ドライバを使用しています。●OpenCV1.0 OpenGL
●DragonFly2 ドライバ
●Sick LMS300 ドライバ
ライセンス
本モジュールは、バイナリで提供します。ライセンスについては、下記連絡先にお問い合わせ下さい。
連絡先
九州大学大学院システム情報科学研究院情報知能工学部門 長谷川研究室tsuji@ait.kyushu-u.ac.jp
〒819-0395 福岡県福岡市西区元岡744 ウエスト2 号館912 室