モータコアユニットの機能を利用すためのコミュニケーションコンポーネントです。 主な機能としては、CANバスにより通信するためCANメッセージ形式で情報を送受信します。 ドキュメントは、RTモジュールファイルに含まれています。
EPL 1.0
千葉工業大学 未来ロボット技術研究センター(furo) http://www.furo.org/ email:info@furo.org
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
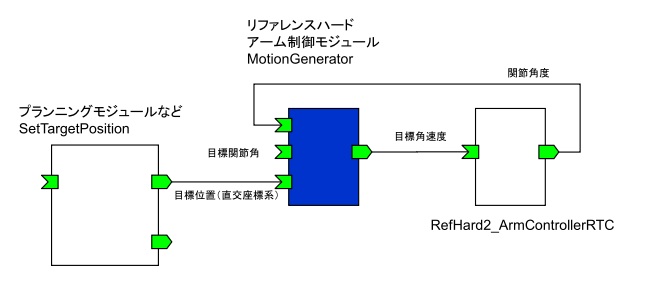
ファレンスハードウェアのアームを制御するためのモジュール。 目標位置もしくは目標関節角度を入力すると,関節角速度指令を出力する。
EPL 詳しい内容については、下記へご連絡願います。
株式会社 東芝 研究開発センター 機械・システムラボラトリー 〒212-8582 川崎市幸区小向東芝町1 Tel :044-549-2193 Email:junichiro.ohga@toshiba.co.jp
リファレンスハード3号機の台車を位置制御するモジュール。 地図データや外界センサなしで手軽に位置制御を実行できる。 このモジュールはノンホロノミック台車に再利用できる。
株式会社 東芝 研究開発センター 機械・システムラボラトリー 〒212-8582 川崎市幸区小向東芝町1 Tel :044-549-2193 Email:rie.katsuki@toshiba.co.jp
富士重工業株式会社 エコテクノロジーカンパニー クリーンロボットプロジェクト AdachiY@utu.subaru-fhi.co.jp
富士重工業株式会社 エコテクノロジーカンパニー クリーンロボットプロジェクト AdachiY@utu.subaru-fhi.co.jp 〒320-8564 宇都宮市陽南1-1- 11
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク




モバイルロボットゲームパック
概要
特徴
仕様
コンポーネント群
新規作成