このコンポーネントは、ロボットコントローラ制御用RTCの共通インタフェースモジュールです。ACT共通インタフェース対応版です。
Eclipse Public License v1.0を適用しています。
IDEC株式会社 rtc_support@idec.co.jp
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。 http://code.google.com/p/idec-rtcs/
シュンク・ジャパン(旧高野ベアリング)社製電動ハンドRH707 を 制御するRTC(動作確認用RTC付き)です。
下記ライブラリを使用しています。 ●ライフロボティクス社製RH707ハンド用コントローラRH700C3制御 ライブラリ(商用)
EPLライセンスを適用しています。
修正BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
筑波大学 大学院システム情報工学研究科 aiyama@esys.tsukuba.ac.jp 〒305-8573 茨城県つくば市天王台1-1-1 Tel: 090-3540-5795 FAX: 029-853-6471(専攻事務室)
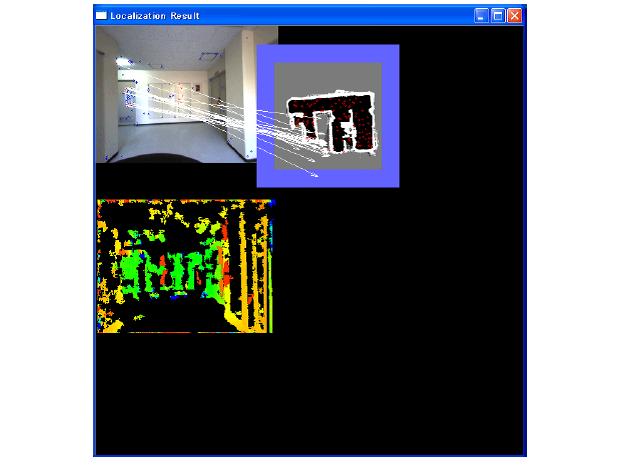
このコンポーネントは、データポートから入力された距離データとロボットの 移動量を用いて大域地図上でのロボット自己位置を推定します。 大域地図(障害物存在確率地図)は、サービスポートからコンポーネント 起動時に受け取ります。
下記ライブラリを使用しています。 ●OpenCV 2.1
修正BSDライセンスを適用しています。
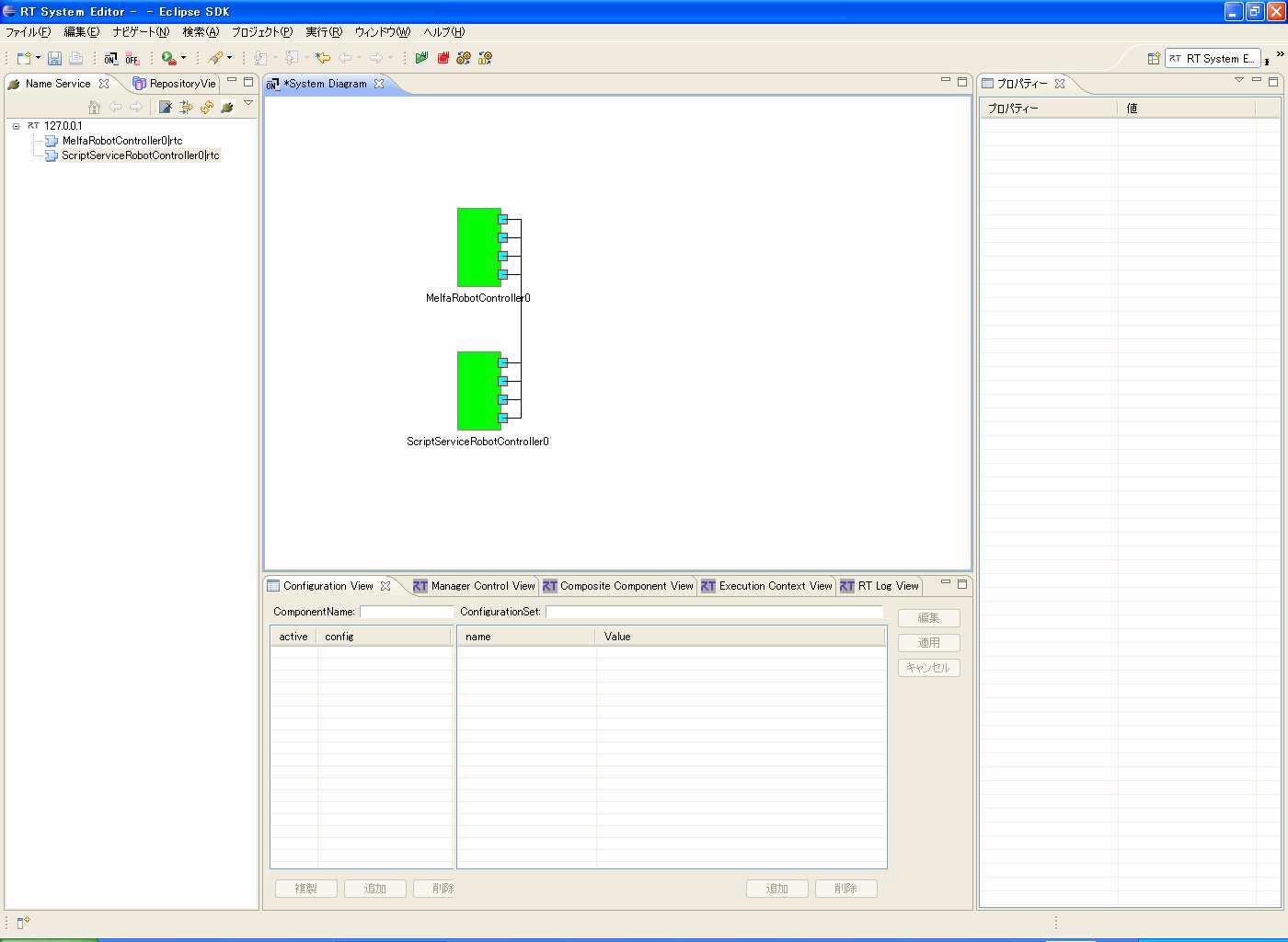
このコンポーネントは、三菱電機製MelfaRXM向けのロボットコントローラ制御用RTCです。ACT共通インタフェース対応版です。
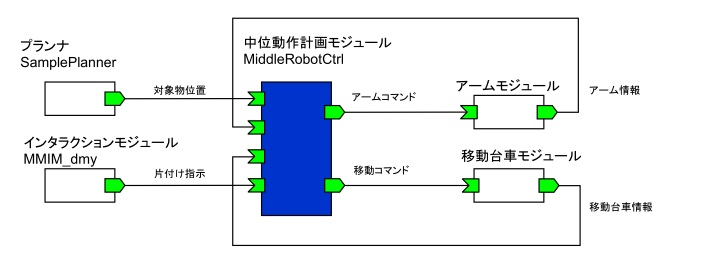
カメラなどで取得した対象物の位置情報を入力すると アームの目標位置列を順に出力するモジュール。
EPL 詳しい内容については、下記へご連絡願います。
株式会社 東芝 研究開発センター 機械・システムラボラトリー 〒212-8582 川崎市幸区小向東芝町1 Tel :044-549-2193 Email:junichiro.ohga@toshiba.co.jp
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
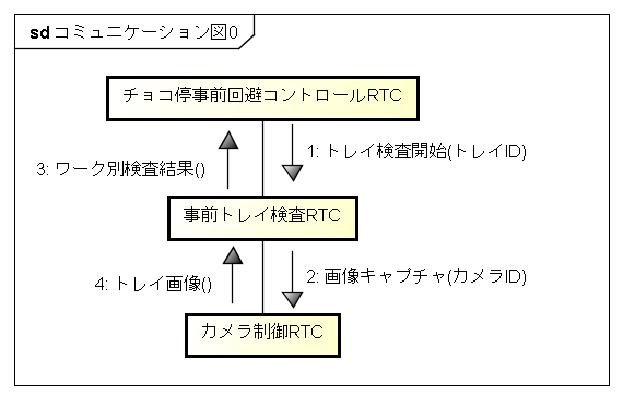
本RTコンポーネントは、ロボット制御セル生産システムにおいて、生産動作 中に、部品供給トレイの各ワーク状態を検査し、位置姿勢の正常/異常を 判定する。&
説明
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

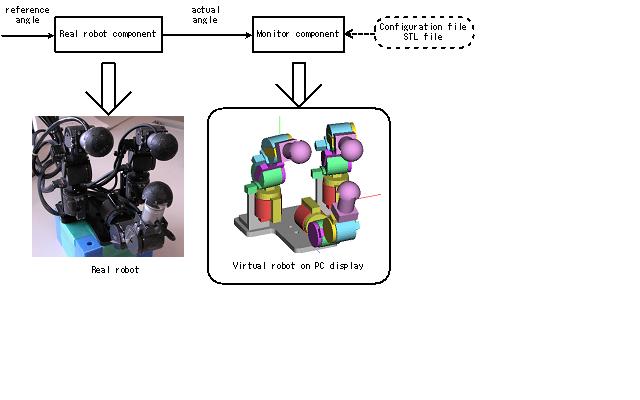

ロボットコントローラ制御汎用機能モジュール
概要
このコンポーネントは、ロボットコントローラ制御用RTCの共通インタフェースモジュールです。ACT共通インタフェース対応版です。
ライセンス
Eclipse Public License v1.0を適用しています。
連絡先
IDEC株式会社
rtc_support@idec.co.jp
Download
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。
http://code.google.com/p/idec-rtcs/