個人同定コンポーネントは入力された画像から人の顔を検出し、 画像に含まれる人の個人識別IDを出力するコンポーネントです。 個人同定コンポーネントは画像に含まれる人の顔の特徴を コンポーネント内部のデータベースに登録し、新しくデータベース に登録された人物に対して自動的に新しい個人識別IDを割り当てます。 2回目から入力された画像の顔の特徴とデータベースに登録された 顔の特徴とが一致したら、同一の個人識別IDを出力します。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しくは、下記までご連絡をお願い致します。
全方位移動搭乗型ロボットを制御するためのコンポーネントです。 主な機能としては、速度指令を入力として搭乗型ロボットをその速度指令通り 走行するように制御します。 また、デットレコリングにより自己位置を出力します。 ドキュメントは、モジュール本体ファイルに含まれています。
EPL 1.0
千葉工業大学 未来ロボット技術研究センター(furo) http://www.furo.org/ email:info@furo.org
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
下記ライブラリを使用しています。 ●OpenCV 2.1.0
独立行政法人 産業技術総合研究所 e.yoshida@aist.go.jp 〒305-8568 茨城県つくば市梅園1-1-1 つくば中央第2 知能システム研究部門AIST-CNRS ロボット工学連携研究体
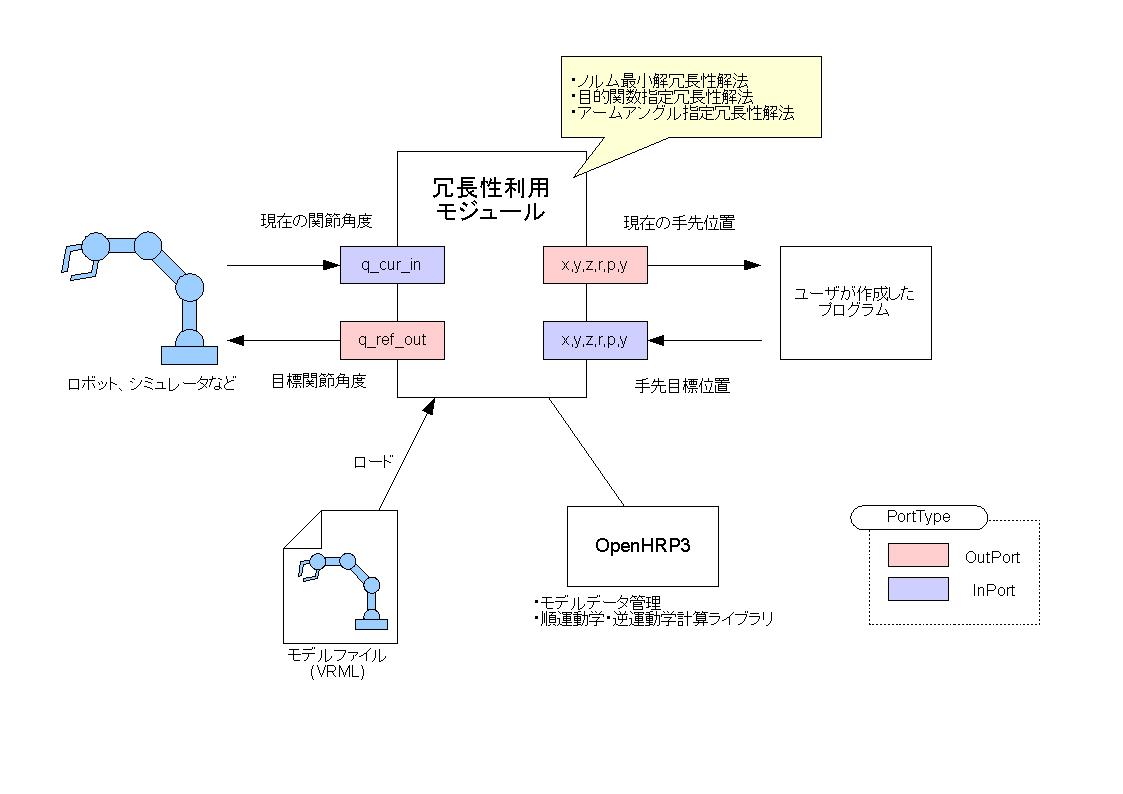
本モジュールは、冗長性を持つロボットアームにおいて、ユーザが指定する 手法で冗長自由度を決定し、現在位置との偏差を出力するコンポーネント です。
対話に必要な身振り・仕草を、ロボットの発話に同期させて出力するRTCです。 特徴1:ロボットの発話内容と共に、指差しなどのジェスチャを 「動作指令スクリプト」で記述。 特徴2:動作指令スクリプトに記述された動作をロボット制御RTCに出力。 ロボット非依存の動作を実現。 (本パッケージには、ロボット制御RTCの外部仕様書とダミーRTCも含まれます。) 特徴3:音声合成RTCを接続することで、動作に同期した発話を実現。
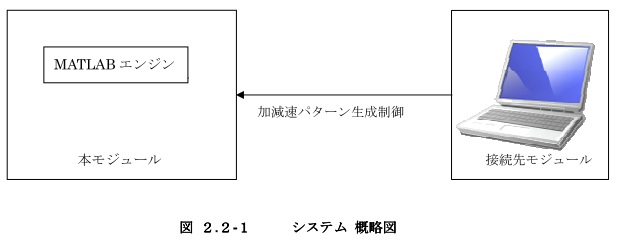
水平2関節ロボットアームの台形則加減速パターンを整形して停止時の 残留振動を抑制する加減速パターンを生成する。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しい内容については、下記へご連絡願います。
三菱電機株式会社 先端技術総合研究所 業務部 技術情報課 http://www.MitsubishiElectric.co.jp/corporate/randd/inquiry/index_at.html お問い合わせ窓口) ATC_webmaster@ra.MitsubishiElectric.co.jp
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク



作業計画モジュール
概要
サービスポートやデータポートを持つ様々なモジュールと接続できるようにカスタマイズされた作業計画モジュール、SDLEngineと呼ぶモジュールを容易に作成できるモジュールです。
この SDLEngine を用いると、Javaとほぼ同等のインタプリタである BeanShell のコンソール
から利用できるようになります。
このため、モジュールを使用するアプリケーションを記述したスクリプトを読み込んで、
モジュール間の接続からアクティベーションを行い、それらのモジュールを制御することが
できます。
ライセンス
EPLライセンスを適用します。連絡先
九州工業大学情報工学研究院生命情報工学研究系ohashi@bio.kyutech.ac.jp
TEL/FAX 0948-29-7821/7801
Download