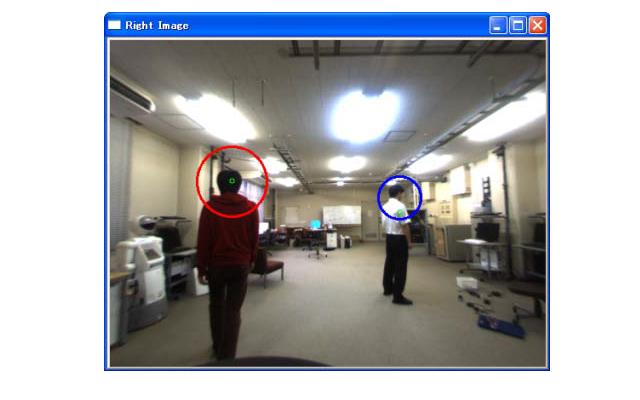
このコンポーネントはステレオカメラ(Bumblebee 2)の情報から人物を 検出し,それぞれの人物の位置と移動速度を出力するコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 1.0.0 ●FlyCapture (配布元:http://www.ptgrey.com/) ●Triclops(配布元:http://www.ptgrey.com/))
修正BSDライセンスを適用しています。
LRFのデータを使ってロボットの前に人間がいるかどうかを判断するコンポーネントです.
修正BSDライセンスを適用しています.
3月上旬頃公開予定
奈良先端科学技術大学院大学 情報科学研究科 robotics-staff@is.naist.jp 〒630-0192 奈良県 生駒市 高山町 8916-5 Tel: 0743-72-5371, Fax: 0743-72-5379
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として 開発されたことを記し、ここに感謝の意を表する。
本プログラムはステレオカメラからの情報を基にした対人追従コンポーネントです。 ColorImageウィンドウには入力された画像が表示されます。 Enterキーを入力することでウィンドウの画像が固定されます。 画像を固定した状態で,マウスドラッグ(左クリック)で追跡対象者の領域を選択することで ロボットのローカル座標系での対象の位置を出力します。 選択された領域はtempウィンドウに表示されます。 入力画像のサイズは320x240pixelです。 出力の型は自己定義のTimedXYDouble,TimedOdometryなどを使用しています。 ご利用の際はご注意ください。
修正BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
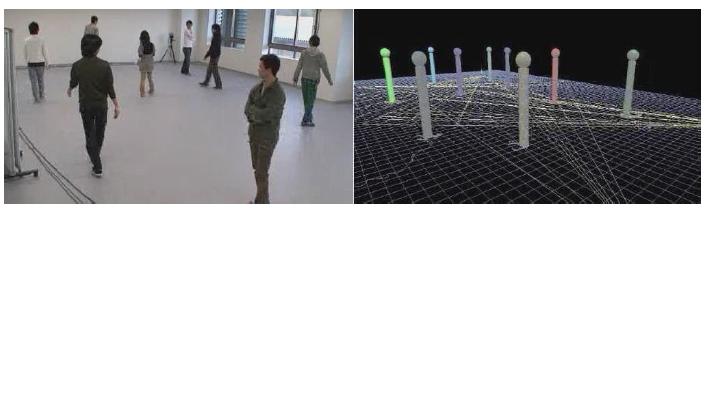
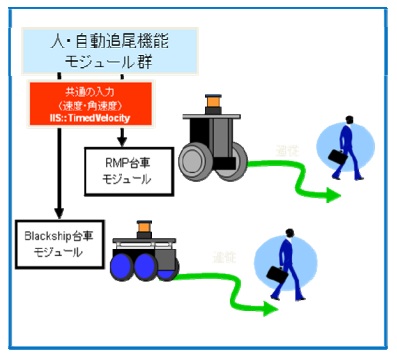
対象人物の色ヒストグラム情報を記憶して、その人を追従する移動体向けの 速度指示値を生成するモジュール群。 人追従機能モジュール群) ・人(位置・距離)認識RTC (Ubuntu/Windows) ・人追従制御RTC (Ubuntu/Windows) ・カメラRTC (Ubuntu) ・レーザーレンジRTC (Ubuntu) ・ゲームパッドRTC (Ubuntu) ※詳細は解凍後のdocフォルダにあるpdfを参照ください。 V1.1にて以下のWindows版のRTCを追加しました。 ・人(位置・距離)認識RTC ・人追従制御RTC V1.2にて ・レーザーレンジRTC(URG)の更新 ・Activate/Disactivate時QTコマンド追加
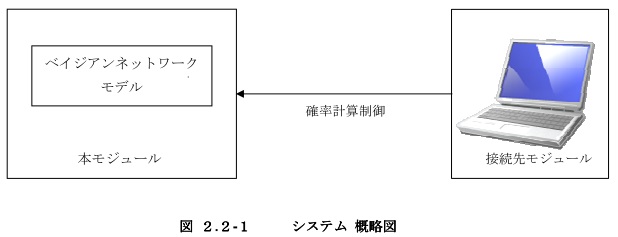
作業エラーの発生傾向分析のために、ベイジアンネットワークを 利用した確率計算機能を提供する。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しい内容については、下記へご連絡願います。
三菱電機株式会社 先端技術総合研究所 業務部 技術情報課 http://www.MitsubishiElectric.co.jp/corporate/randd/inquiry/index_at.html お問い合わせ窓口) ATC_webmaster@ra.MitsubishiElectric.co.jp
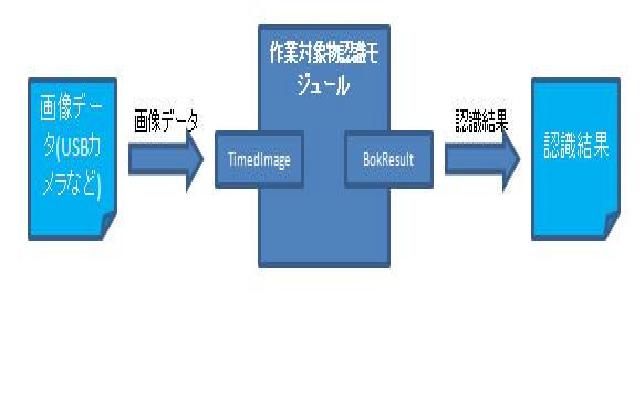
本モジュールは、入力された画像に対してBagOfKeypoints法を使用し、 作業対象物を認識し、認識した対象物と確度を出力するモジュールです。
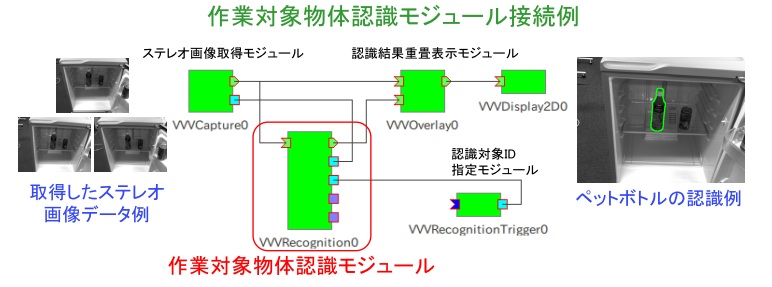
産業技術総合研究所が開発している3次元物体の認識機能を応用し 指定された対象物体の位置・姿勢を共通形式で出力するモジュール群です。
関連モジュール ステレオ画像取得RTC 認識結果の重畳表示RTC 画像データの表示RTC
利用に際しては高機能3次元視覚システムVVVのキャリブレーションデータが必要になります。 詳細に関しましては下記へお問い合わせ下さい。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
人検知モジュールを用いた人協働ロボットシステム
概要
仕様
人検出コンポーネント