クラウドをサービスを構築するために使われるクラスタ構築ツールである Kubernetes を活用し、 ロボットシステム開発・運用を効率化する方法を示します。 RTC の開発だけでなく、RTC の PC への配置・起動に関する運用面での効率化にも貢献します。
https://github.com/r-kurose/rtm_k8s/blob/master/index.md
ARToolKitPlusマーカを読み取り、そのIDと位置姿勢(6DOF)を返します。 入力ポートのデータ型はImg::TimedCameraImage 出力ポートのデータ型は要素数20のRTC::TimedDoubleSeqです。
LGPL+個別ライセンスのデュアルライセンス。
ただいま、準備中。しばらくお待ちください。
独立行政法人 産業技術総合研究所 知能システム研究部門 サービスロボティクス研究グループ 〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二 Tel/Fax:029-861-3427/029-862-3493 email: srrg@m.aist.go.jp
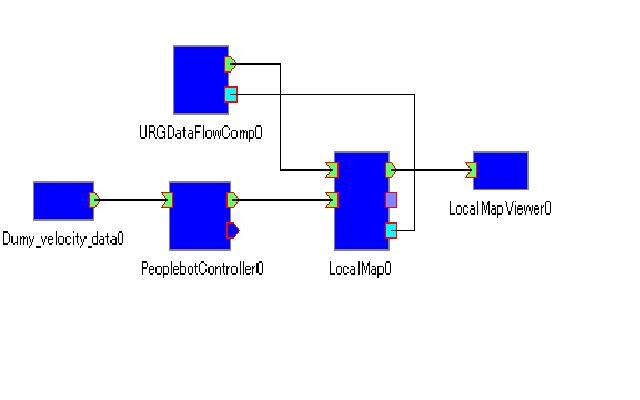
このコンポーネントはMobile Robots 社のロボット用の 制御コンポーネントです。
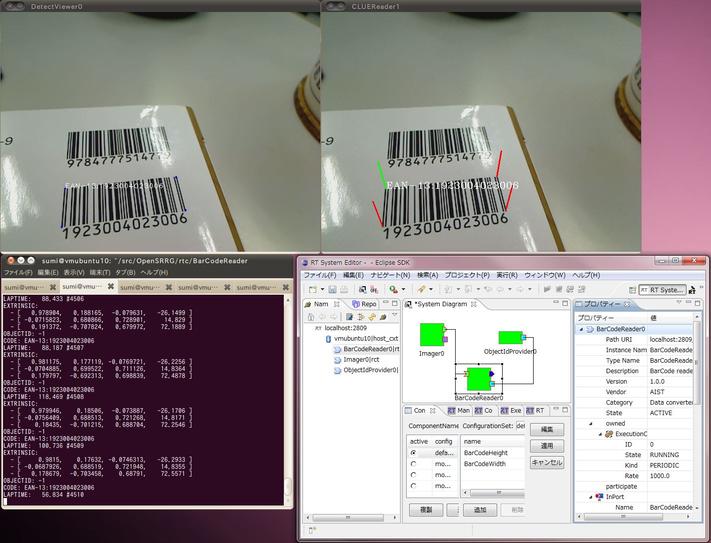
下記ソフトウェアを使用しています。 ●ZBar-0.10 ●ARToolKitPlus-2.1.5 ●OpenCV-2.0
本コンポーネントの動作環境は、以下のとおりです。 ●画像認識ボード用組込Linux(富士通研究所様ご提供) ●OpenRTM-aist1.0対応画像認識ボード用RTM(セック様ご提供)
修正BSDライセンスを適用しています。 詳しくは、ドキュメントに同梱の"license.pdf"をご覧ください。
本コンポーネントの動作環境は、以下のとおりです。 ●画像認識ボード用組込Linux(富士通研究所様ご提供) ●OpenRTM-aist-1.0.0(C++版)の富士通画像認識モジュール用クロスコンパイル) (株式会社セック様より詳しい情報はご案内予定)
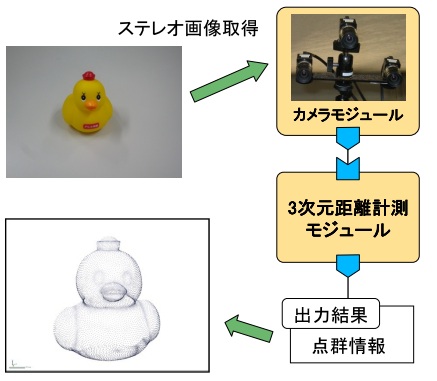
入力されたステレオ画像を処理し、3次元位置や色などの 情報を持つ点群データを出力するモジュールです。
実行ファイルを有償でご提供させて頂きます。 詳しくは、下記へご相談ください。
独立行政法人 産業技術総合研究所 知能システム研究部門 タスクビジョン研究グループ 〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二 email:irtsp-vvv@m.aist.go.jp
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
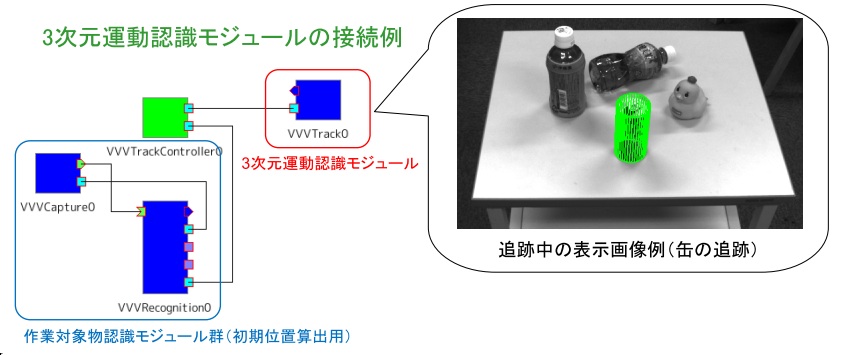
共通認識形式データで対象のモデルと初期姿勢を与えると、それを基に対象を 追跡し3次元位置・姿勢を連続的に出力するモジュールです。
利用に際しては対象物体に関する高機能3次元視覚システムVVVの モデルデータが必要になります。 詳細に関しましてはお問い合わせ下さい。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
異種ミドルウェア相互運用のための座標変換コンポーネントの開発
目的
異種ミドルウェアの相互運用とコンポーネントの再利用性向上を図るためにRTCの座標系管理を一括で行う座標系管理RTCを作成するシステム概要
他のコンポーネントから入力される座標系に関するデータを座標変換し,出力するコンポーネント仕様