入力されたステレオ画像を処理し、3次元位置や色などの 情報を持つ点群データを出力するモジュールです。
実行ファイルを有償でご提供させて頂きます。 詳しくは、下記へご相談ください。
独立行政法人 産業技術総合研究所 知能システム研究部門 タスクビジョン研究グループ 〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二 email:irtsp-vvv@m.aist.go.jp
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
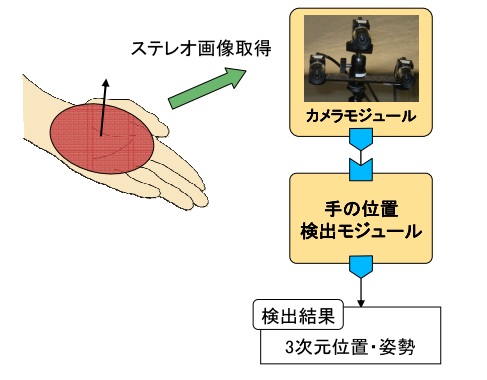
入力されたステレオ画像を処理し、手のひらのような物体を置ける面の 3次元位置と傾きを出力するモジュールです。
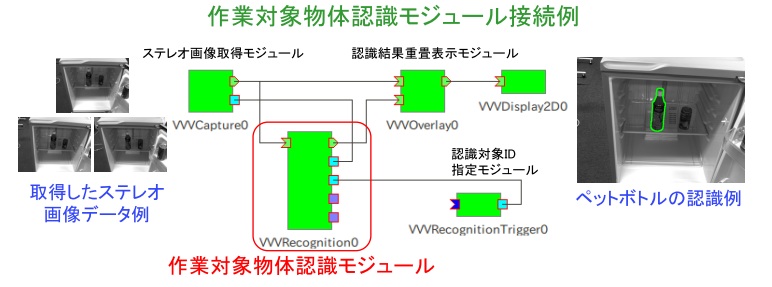
EPBM形式画像データをディスプレイに表示するモジュールです。
関連モジュール 作業対象物認識モジュール群 ステレオ画像取得RTC 認識結果の重畳表示RTC
利用に際しては高機能3次元視覚システムVVVのキャリブレーションデータが必要になります。 詳細に関しましては下記へお問い合わせ下さい。
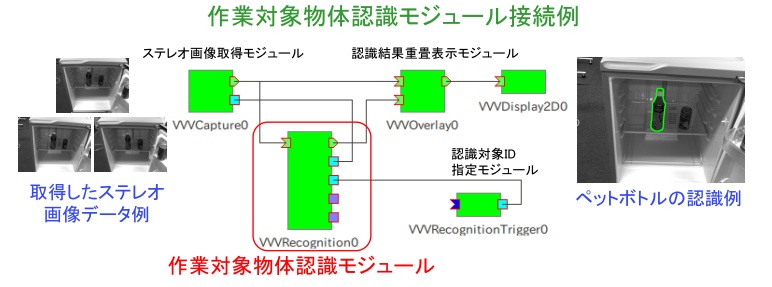
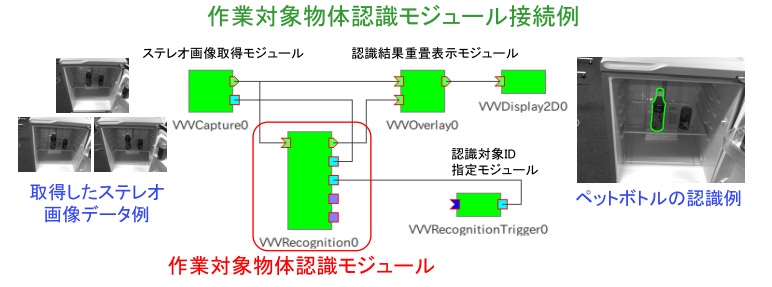
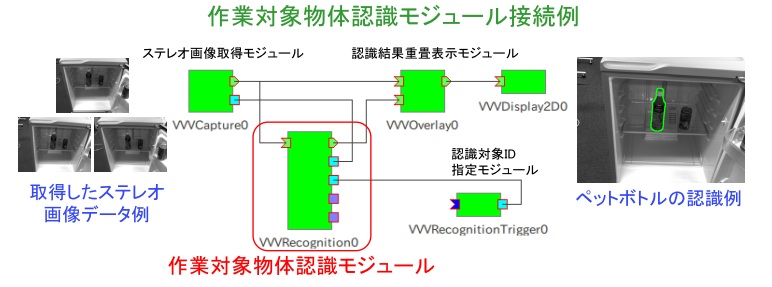
産業技術総合研究所が開発している3次元物体の認識機能を応用し 指定された対象物体の位置・姿勢を共通形式で出力するモジュール群です。
関連モジュール 作業対象物認識モジュール群 ステレオ画像取得RTC 画像データの表示RTC
関連モジュール ステレオ画像取得RTC 認識結果の重畳表示RTC 画像データの表示RTC
計算機に接続された複数のカメラを用いて、産総研VVV形式に基づく ステレオ画像データを作成し出力するモジュールです。
関連モジュール 作業対象物認識モジュール群 認識結果の重畳表示RTC 画像データの表示RTC
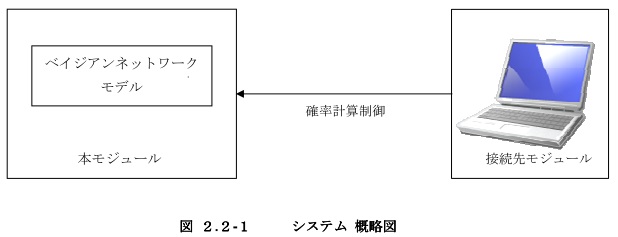
作業エラーの発生傾向分析のために、ベイジアンネットワークを 利用した確率計算機能を提供する。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しい内容については、下記へご連絡願います。
三菱電機株式会社 先端技術総合研究所 業務部 技術情報課 http://www.MitsubishiElectric.co.jp/corporate/randd/inquiry/index_at.html お問い合わせ窓口) ATC_webmaster@ra.MitsubishiElectric.co.jp
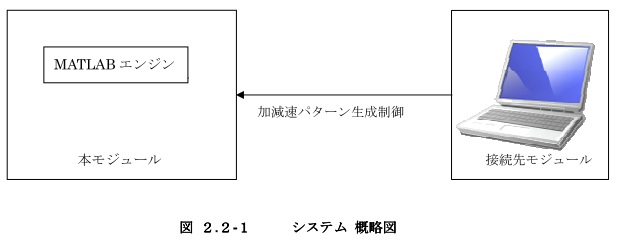
水平2関節ロボットアームの台形則加減速パターンを整形して停止時の 残留振動を抑制する加減速パターンを生成する。
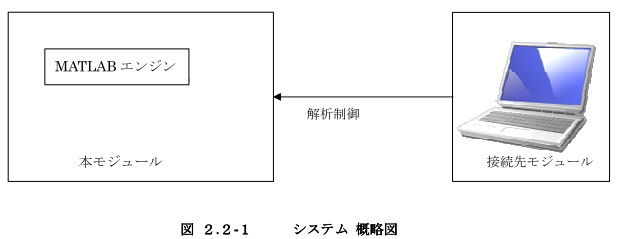
押し操作の準静的解析に基づいたロボットハンドの把持解析を行うための RTCサービスポートを提供する。把持解析では、摩擦のある水平面上に 置かれた対象物体を複数の指で押した際の指の動きから、対象物体の動き を求める。
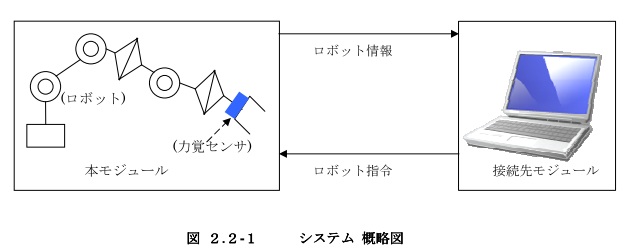
三菱電機産業用ロボット(MELFA)とニッタ製力覚センサの協調動作を 制御するためのRTC入出力ポートを提供する。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
3次元距離計測モジュール
概要
入力されたステレオ画像を処理し、3次元位置や色などの
情報を持つ点群データを出力するモジュールです。
ライセンス
実行ファイルを有償でご提供させて頂きます。
詳しくは、下記へご相談ください。
連絡先
独立行政法人 産業技術総合研究所
知能システム研究部門 タスクビジョン研究グループ
〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二
email:irtsp-vvv@m.aist.go.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。