洞窟での測量は,地理学や地質学的な観点から重要なタスクの一つであり,センサ技術を利用したデジタル化が望まれている一分野である.特に,3 次元距離計測は洞窟内の地図構築や洞窟の形状把握が可能となるため,小型化された計測システムと解析技術の発展が望まれている.そこで,本研究では洞窟内の測量を実現するための計測機器を開発し,RT コンポーネント(RTC)により計測システムを構築することで,容易に洞窟内での計測が可能となるシステム化の有効性を示すコンポーネント群である.
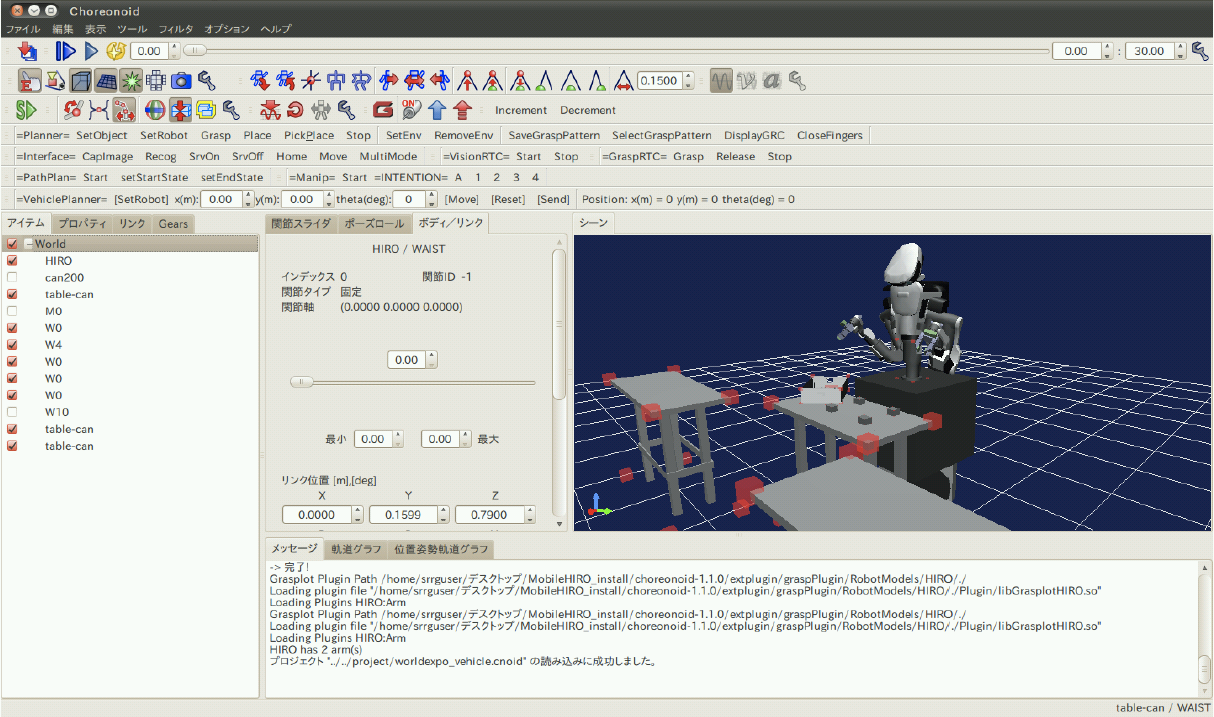
MobileHIRO操作用統合環境は移動型双腕ロボットMobileHIROを実機およびシミュレータ(Choreonoid)上で動作させるための統合環境です。
この統合環境では、移動型双腕ロボットMobileHIROの移動・把持動作の計画作成を行い、計画に基づいた指令を実際のロボットへ送信し作業を行わせることを目的としています。
本システムを利用することで、MobileHIROを以下の2つのステップで運用することが可能となります。
公開準備中
Kinova社のロボットアームJACOを制御するためのインターフェース。
・Windowsの.NETフレームワーク4以上でのみ動作します。 ・上記のミドルウェア環境のみで動作します。 ・本モジュールの使用にはJACOの制御ライブラリ(ライセンス付)が別途必要です。
修正BSDライセンスを適用しています。
独立行政法人 産業技術総合研究所 知能システム研究部門 サービスロボティクス研究グループ 〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二 Tel/Fax:029-861-3427/029-862-3493 email: srrg@m.aist.go.jp
共通カメラインタフェースに対応したバーコードリーダコンポーネント群です。
下記ライブラリを使用しています。 ●OpenCV 2.x (※) ●ARToolKitPlus-2.1.5 ※OpenCV-2.2はARToolKitPlus?-2.1.5と干渉するので使えません。
OpenRTM-aist-1.0 のライセンスに準じます。
下記ライブラリを使用しています。 ●OpenCV 2.1.0
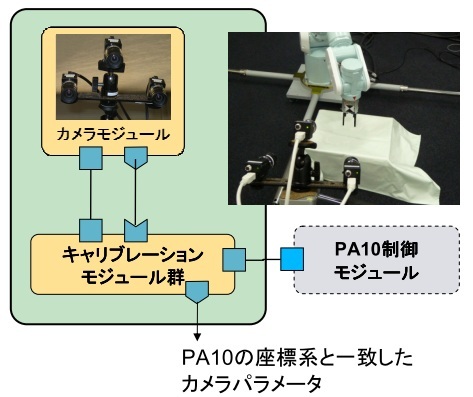
PA10のアームに添付したマーカを環境に固定したカメラで観測することで カメラのキャリブレーションとPA10-カメラ間の座標の一致を同時に行います。
※本RTC群の動作にはステレオ画像取得RTCが必要です。 別途ご用意願います。
利用に際しては対象物体に関する高機能3次元視覚システムVVVの モデルデータが必要になります。 詳細に関しましてはお問い合わせ下さい。
実行ファイルを有償でご提供させて頂きます。 詳しくは、下記へご相談ください。
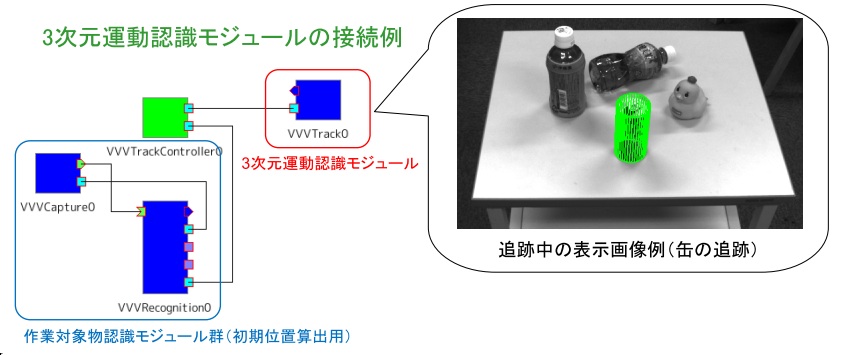
共通認識形式データで対象のモデルと初期姿勢を与えると、それを基に対象を 追跡し3次元位置・姿勢を連続的に出力するモジュールです。
独立行政法人 産業技術総合研究所 知能システム研究部門 タスクビジョン研究グループ 〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二 email:irtsp-vvv@m.aist.go.jp
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
Lidarを用いた洞窟3次元測量システムのRTコンポーネント開発
目的
洞窟での測量は,地理学や地質学的な観点から重要なタスクの一つであり,センサ技術を利用したデジタル化が望まれている一分野である.特に,3 次元距離計測は洞窟内の地図構築や洞窟の形状把握が可能となるため,小型化された計測システムと解析技術の発展が望まれている.そこで,本研究では洞窟内の測量を実現するための計測機器を開発し,RT コンポーネント(RTC)により計測システムを構築することで,容易に洞窟内での計測が可能となるシステム化の有効性を示すコンポーネント群である.