ステレオカメラを利用し、指定された作業対象物の検出結果(3次元位置・姿勢)を共通形式で出力するモジュール群です。
オープンソース版作業対象認識モジュール群 座標系変換ツール「OpenVGRextra」 オープンソース版作業対象認識モジュール群に付加して使用するツールです。 認識結果の座標系を変換するために利用します。
オープンソース版作業対象認識モジュール群に付加して使用するツールです。 認識結果の座標系を変換するために利用します。
オープンソース版作業対象認識モジュール群「OpenVGR」 ステレオカメラを利用し、指定された作業対象物の検出結果(3次元位置・姿勢)を 共通形式で出力するモジュール群です。
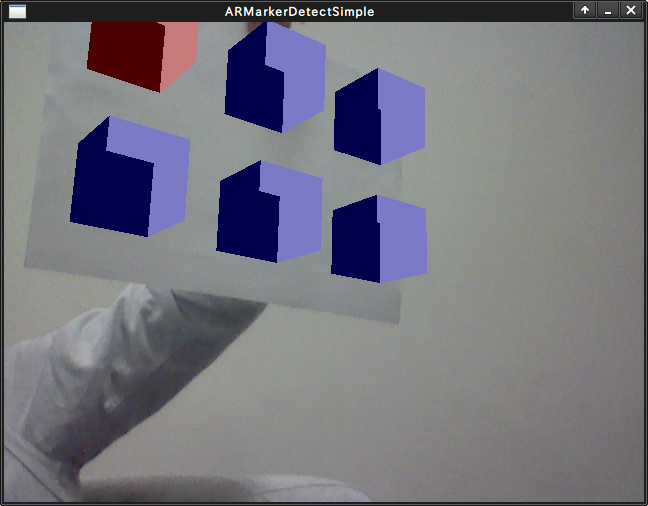
ARTool Kitを利用し、マーカの検出・位置姿勢推定を行うRTC。
下記ライブラリを使用しています。 ●ARTool Kit 2.72.1, OpenGL, GLUT, GLEW, OpenCV 2.0.0
ARTool Kitマーカ検出・位置姿勢推定モジュール 本モジュールのライセンスは、ARTool Kit のライセンス(GPL)に従います。 本モジュールの改変・再配布等については、GPL に従って行ってください。
画像キャプチャコンポーネント 商用以外の利用の場合、BSDライセンスが適用されます。 商用利用の際には、個別に使用条件を検討させて頂きます。 詳しくは、ご連絡をお願い致します。
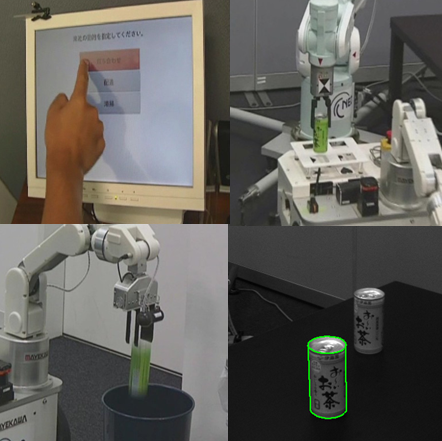
来訪者の入館・退館における受付業務を主としたオフィスサービスを行うもの とする。 このシステムで行われるサービス内容は、表.サービス一覧に示すサービスに 分割されており各サービス毎及び、サービス連動での動作を可能とする。
【サービス 一覧】
シュンク・ジャパン(旧高野ベアリング)社製電動ハンドRH707 を 制御するRTC(動作確認用RTC付き)です。
下記ライブラリを使用しています。 ●ライフロボティクス社製RH707ハンド用コントローラRH700C3制御 ライブラリ(商用)
EPLライセンスを適用しています。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク





アピアランスベース物体位置・姿勢推定コンポーネント(CPU版)
概要
本コンポーネントは予め取得した画像をモデルとして,アピアランスベースの任意物体の検出及び位置・姿勢の推定を行う。SIFT特徴を用いることで,
日常環境における照明条件の変化や物体の見え方におけるスケール変化,
回転変化に強固な物体検出を実現する。
注意事項
下記ライブラリを使用しています。●OpenCV 1.1
ライセンス
修正BSDライセンスを適用しています。詳しくは、ご連絡をお願い致します。
連絡先
国立大学法人 大阪大学 大学院基礎工学研究科k-oohara@arai-lab.sys.es.osaka-u.ac.jp
〒560-8531 大阪府豊中市待兼山町1-3
Tel: 06-6850-6368, Fax: 06-6850-6341