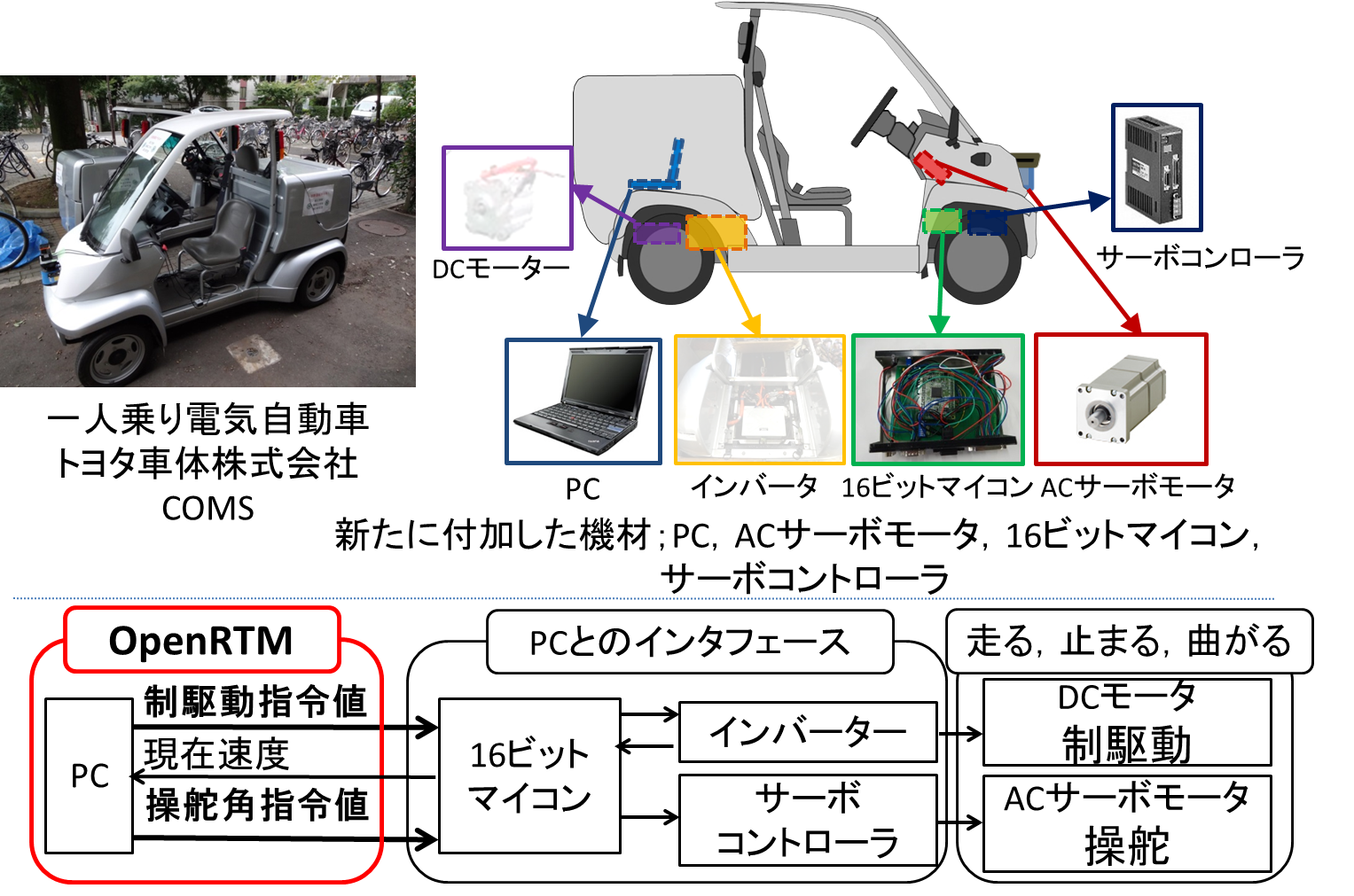
ロボットアーム先端に取り付け、対象物の検出を 行うためにマルチPSD距離センサを用いた簡易計測 モジュール制作し、それを制御するRTCの開発を行いました。 また、ご指摘いただいた内容をRTCに反映した他、 インターフェース部分のRTCを分離し、使用するインターフェースに合わせて交換できるようにしました。
PSD(Position Sensing Device)距離センサを用いた500mlペットボトル形状対象物との 相対位置を検出する計測システムとして相対位置検出モジュール及び、それを制御するコンポーネントをRTMで開発した。
特に近年WEBのサービスとして音声認識や画像検索をはじめとした技術の利用が可能となってきています。 これによりWEB上の膨大な知識を利用することが可能となります。googleで提供するサービスのうち、音声認識や音声合成、そのほかの検索サイトによる検索サービスを利用するRTC群を開発しました。
Webコンテンツに設置しているソーシャルネットワークサービス(SNS)のボタンの新しい反応を提示するデバイスの開発を行った。コンテンツの反応の取得には各サービスによって方法が異なっており、仕様変更により様々な反応の取得方法が提案されている。 それに伴い、RTミドルウエアを用いて効率的にデバイスを開発を行った。
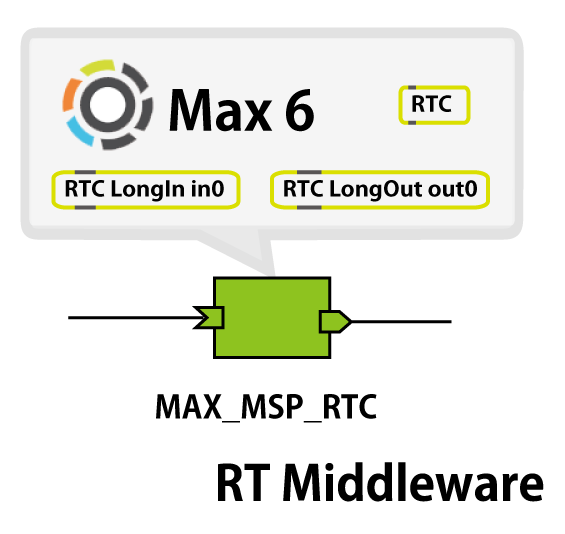
RTCGatewayはCycling’74社のMax(MAX/MSP)とOpenRTM-aistとの間でデータ交換を行うことができるプラグインです。MaxのExternalオブジェクトとして実装されており、Max側ではRTCオブジェクトとして、RTM側ではRTコンポーネントMAX_MSP_RTCとして扱われます。 Max(MAX/MSP)はシンセサイザーのコントロールのためのビジュアルプログラム環境として開発されましたが、現在はリアルタイム音響処理、映像処理・生成、MIDI・様々なデバイスのコントロールに対応しています。オブジェクトと呼ばれる特定の機能を持った部品同士を線でつなぐ(Patch)ことでプログラミングができるようになっており、音楽表現、舞台演出、メディアアートなどのインタラクティブなシステム開発にとって強力なツールとなっています。 RTCGatewayを導入することでMaxで主にロボット用に開発されたRTコンポーネントを比較的簡単に利用することができます。例えばロボットを用いたメディアアート作品の制作の際、音や映像といったインタフェースとロボット制御との間でのデータ交換を行うことも可能です。
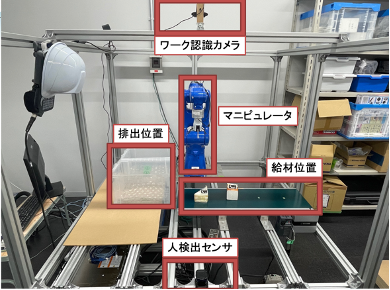
ロボットマニピュレータを安全に稼動させる上で,事前にシミュレータを用いて動作検証を行うことは重要である. 本コンポーネントはシミュレータを用いた動作検証を支援する.
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク




メディアアートへのRTミドルウェアを用いた開発手法の提案
概要
特徴
仕様