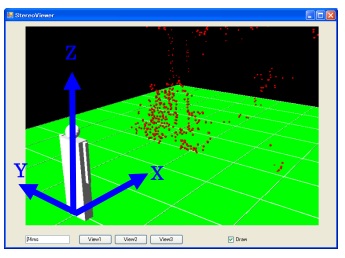
コーナー、エッジの特徴点のクラスタリングを行い 3次元位置を計測するコンポーネント 富士通九州ネットワークテクノロジーズより販売している 「ステレオビジョンモジュール」上で動作します。
ステレオビジョンモジュール購入者に無償提供致します。 下記URLのステレオビジョンモジュール ソフトウェア提供依頼フォームよりご依頼ください。
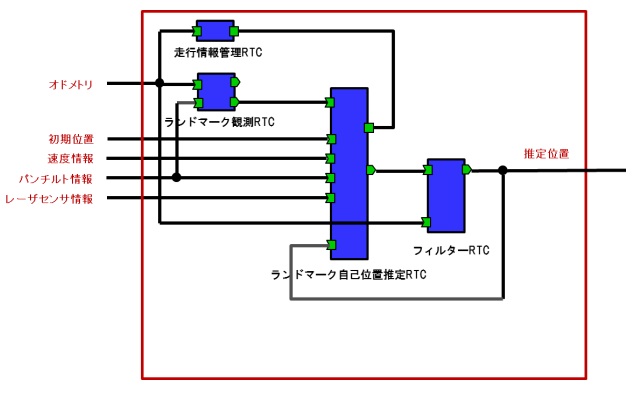
レイアウト地図とランドマーク地図を利用した自己位置推定モジュール群です。 富士通九州ネットワークテクノロジーズより販売している 「ステレオビジョンモジュール」とWindows PCが必要です。
160x120のステレオ画像から各画素の3次元位置を計測するRTコンポーネント 富士通九州ネットワークテクノロジーズより販売している 「ステレオビジョンモジュール」上で動作します。
特徴点の3次元計測と顔検出を実行するRTコンポーネント。 富士通九州ネットワークテクノロジーズより販売している 「ステレオビジョンモジュール」上で動作します。
画像内から特徴点を抽出し、3次元位置を計測するRTコンポーネント 富士通九州ネットワークテクノロジーズより販売している 「ステレオビジョンモジュール」上で動作します。
移動ロボット用知能モジュール群をオープンソースで公開します。 ドキュメントは、RTモジュールファイル本体に含まれています。
EPL 1.0
千葉工業大学 未来ロボット技術研究センター(furo) http://www.furo.org/ email:info@furo.org
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
モータコアユニットの機能を利用すためのコミュニケーションコンポーネントです。 主な機能としては、CANバスにより通信するためCANメッセージ形式で情報を送受信します。 ドキュメントは、RTモジュールファイルに含まれています。
全方位移動搭乗型ロボットを制御するためのコンポーネントです。 主な機能としては、速度指令を入力として搭乗型ロボットをその速度指令通り 走行するように制御します。 また、デットレコリングにより自己位置を出力します。 ドキュメントは、モジュール本体ファイルに含まれています。
・オープンソースにて公開 ・PeakSystem社CAN-USBインターフェースに対応 ・Ubuntu 10.04に対応
スイスMESA社製の3次元距離測定カメラSwissRanger SR4000のRTC。 実行バイナリとマニュアルのみの配布。 独自定義のIDL(OpenRTMのInterface GuideLineのI/Fを一部継承)に よりデータポートとサービスポートを規定。
非営利・非商用での利用に限り、バイナリーファイルにて 無償公開にしています。 商用利用やソースコードの提供に関しましては 下記へご相談ください。
弊社の自社サイトでの公開を予定しています。 詳しくは、下記へご連絡願います。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

障害物クラスタ抽出モジュール
概要
コーナー、エッジの特徴点のクラスタリングを行い
3次元位置を計測するコンポーネント
富士通九州ネットワークテクノロジーズより販売している
「ステレオビジョンモジュール」上で動作します。
ライセンス
ステレオビジョンモジュール購入者に無償提供致します。 下記URLのステレオビジョンモジュール ソフトウェア提供依頼フォームよりご依頼ください。