AGVによる部品運搬とHIROによる物体操作の実行順序を制御して 連携作業を行うモジュール 2012年2月24日にコンポーネント本体とマニュアルをアップロードしました。 2012年3月24日に,バグを修正した状態機械RTCをアップロードしました。
下記ライブラリを使用しています。 ●OpenCV 2.1
修正BSDライセンスを適用しています。
国立大学法人 豊橋技術科学大学 行動知能システム学研究室 〒441-8580 豊橋市天伯町雲雀ヶ丘1-1 email: rtc@aisl.cs.tut.ac.jp
本コンポーネント群はOpenHRP3のシミュレータを用いて、車体速度を入力とする対向二輪型の移動ロボットを経路に沿って走行させる移動機能を統合したモジュール群です。
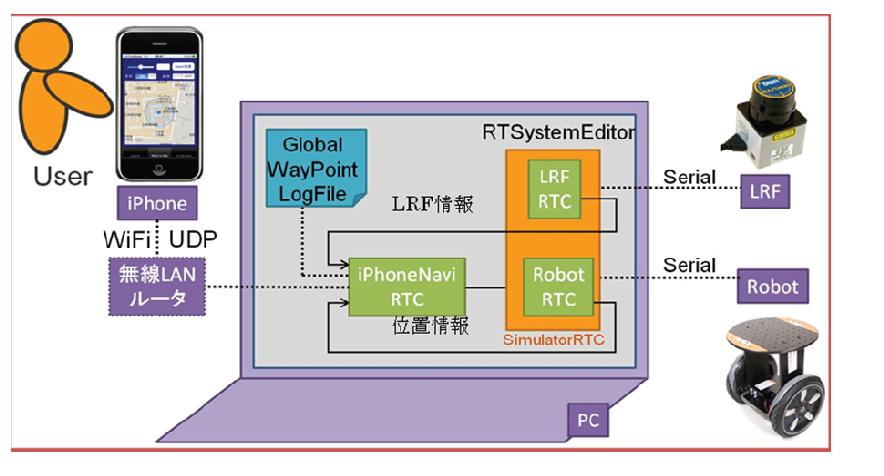
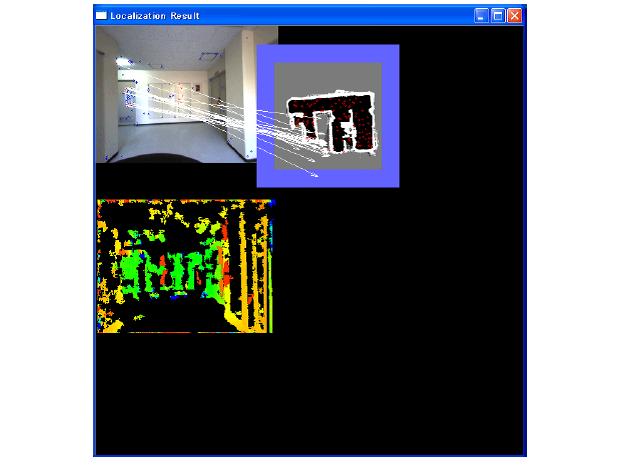
このコンポーネントは、データポートから入力された距離データとロボットの 移動量を用いて大域地図上でのロボット自己位置を推定します。 大域地図(障害物存在確率地図)は、サービスポートからコンポーネント 起動時に受け取ります。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
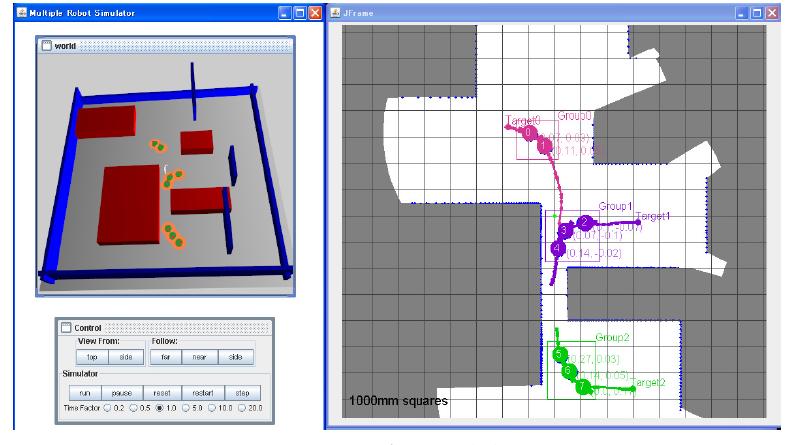


複数台ロボットシミュレータモジュール(オープンソース)
概要
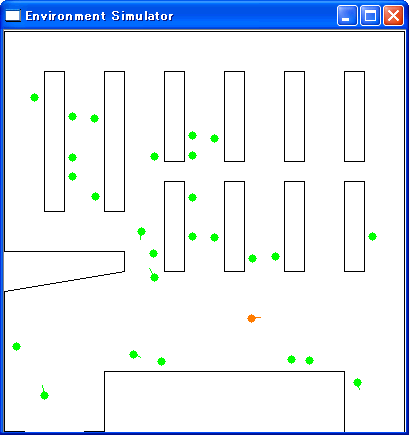
本知能モジュールは,複数台移動ロボットのシミュレーションを行うことができるモジュールです。シミュレータには,Simbad というフリーシミュ
レータを利用しており,本モジュールにその機能が組み込まれています。
注意事項
下記ライブラリを使用しています。●Java3Dライブラリ
http://java.sun.com/javase/technologies/desktop/java3d/index.jsp
●Simbadシミュレータ
http://sourceforge.net/projects/simbad/files/
ライセンス