このコンポーネントは、Point Grey 社製ステレオカメラ 「Bumblebee2」から画像およびステレオ距離データ を取得するためのコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 2.1 およびOpenCV 2.2 ●Bumblebee 2 BB2-08S2C-25(XGA,カラー,画角110 度) ●FlyCapture v1.7(カメラ付属の画像取得ライブラリ)) ●Triclops v3.2(カメラ付属のステレオ処理ライブラリ)
修正BSDライセンスを適用しています。
奈良先端科学技術大学院大学 情報科学研究科 j-taka@is.naist.jp 〒630-0192 奈良県 生駒市 高山町 8916-5 Tel: 0743-72-5371, Fax: 0743-72-5379
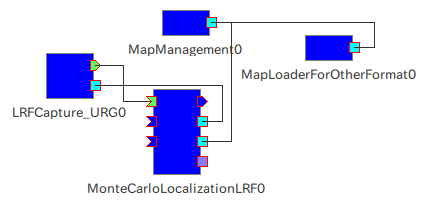
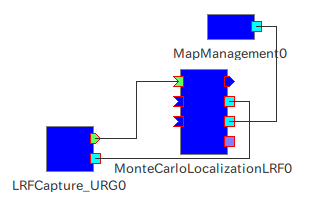
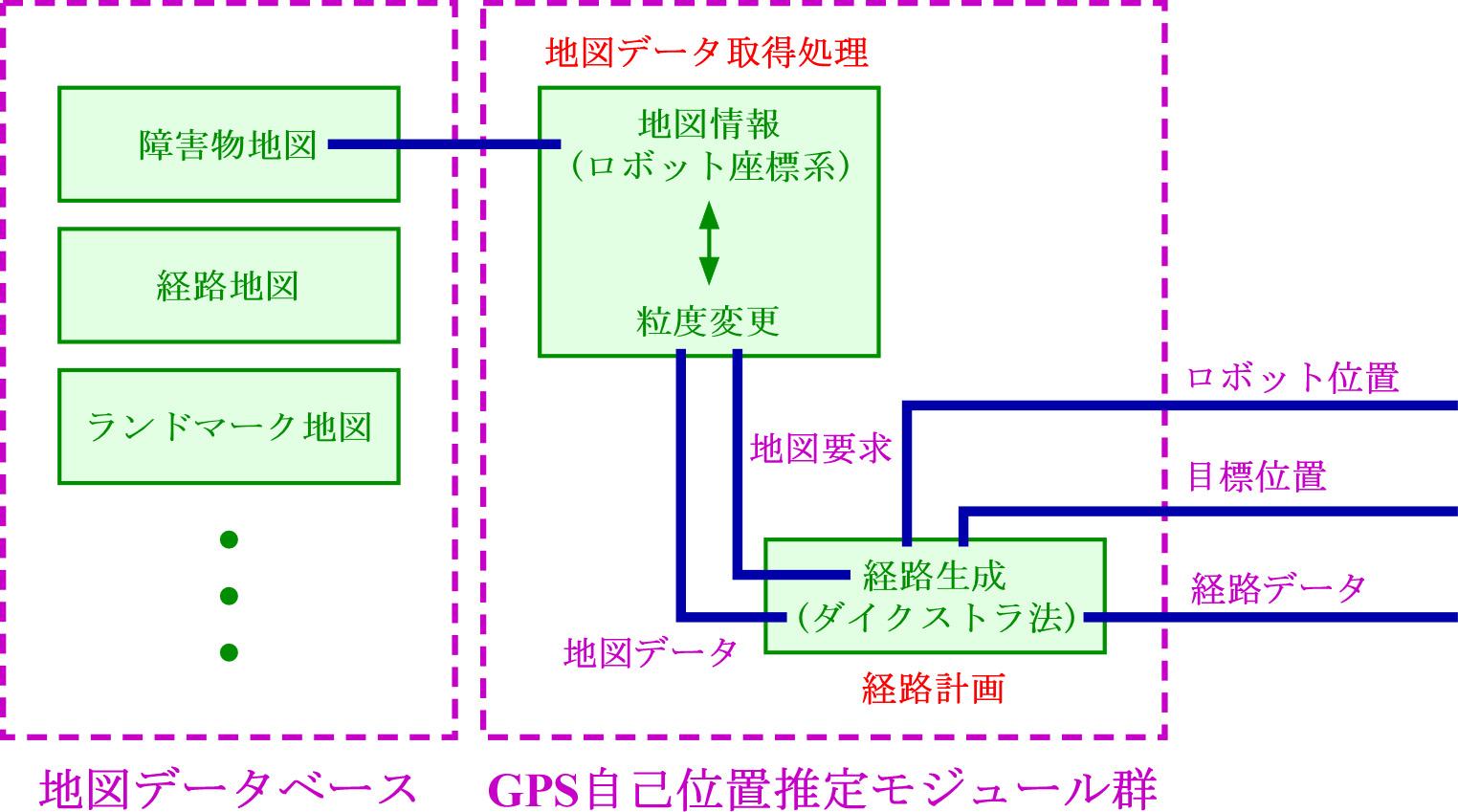
本プログラムは、LRF距離データ,オドメトリ情報を取得し,地図とのマッチングを行うことで 自己位置を推定するRTコンポーネントです。
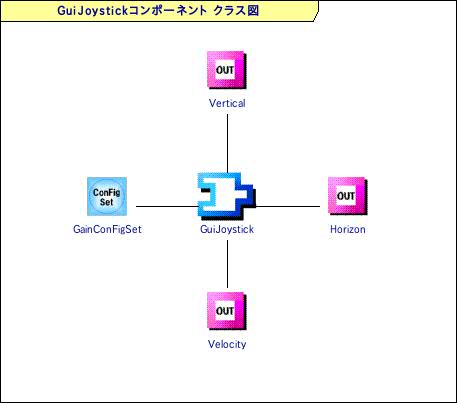
本プログラムは、GUIを利用したジョイスティックシミュレートコンポーネント です。x-y座標上でクリック(ドラッグ)した任意の座標値を出力します。 付加機能としてロボット走行指令のためのTimedVelocity型の値を出力 することも可能です。
BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
(特)国際レスキューシステム研究機構 fujinaga@rescuesystem.org 〒653-0042 神戸市長田区二葉町7-1-18地域人材支援センター1階 Tel:078-641-2840 Fax:078-641-2841 URL:http://www.rescuesystem.org
(特)国際レスキューシステム研究機構 fujinaga@rescuesystem.org 〒653-0042 神戸市長田区二葉町7-1-18地域人材支援センター1階 Tel:078-641-2840 Fax:078-641-2841
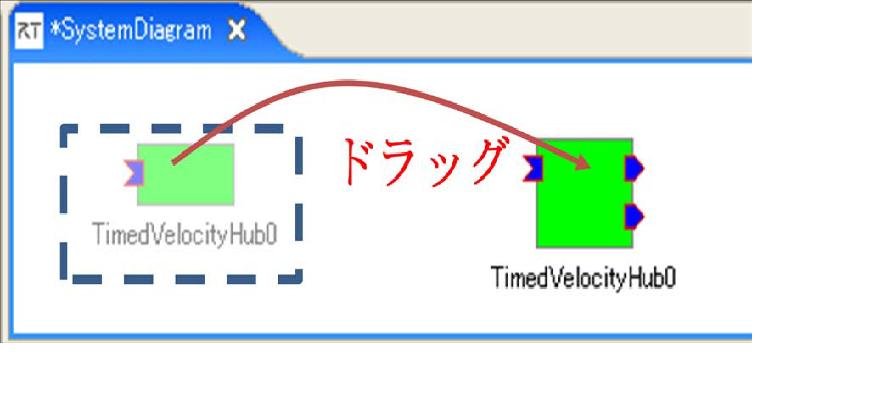
このコンポーネントはTimed Velocity データを複数に分岐するコンポー ネントです。
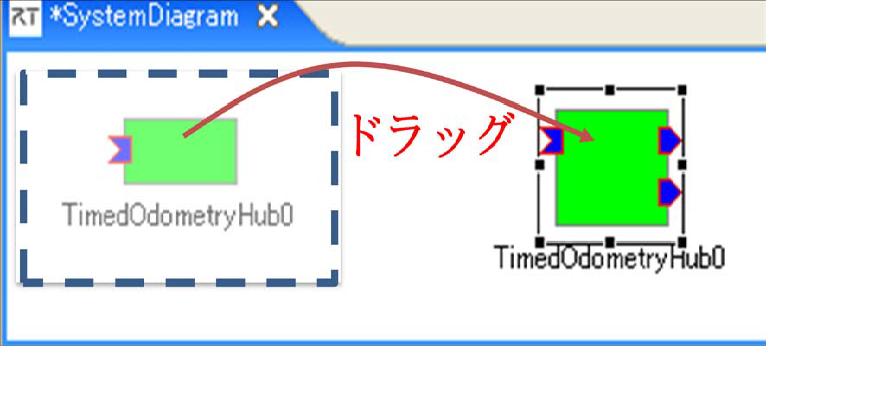
このコンポーネントはTimed Odometry データを複数に分岐するコンポー ネントです。
豊橋技術科学大学 情報・知能工学系 rtc@aisl.cs.tut.ac.jp 〒441-8580 愛知県豊橋市天伯町雲雀ヶ丘1-1 TEL: 0532-44-6826 URL: http://www.aisl.cs.tut.ac.jp/
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

大局地図への3次元情報追記コンポーネント
概要
本コンポーネントは,二次元占有格子地図と三次元情報を受け取り,三次元地図への統合・三次元表示を行うコンポーネントです。
注意事項
以下のパッケージの追加インストールが必要になります。●gtk+-2.0
●gtkglext-1.0
●opencv2.0
ライセンス
修正BSDライセンスに基づき配布されます。詳しくは、LICENSE.txtファイルをご覧ください。
連絡先
東京大学 知能機械情報学専攻 情報システム工学研究室itngr@jsk.t.u-tokyo.ac.jp
Download