このコンポーネントはMobile Robots 社のロボット用の 制御コンポーネントです。
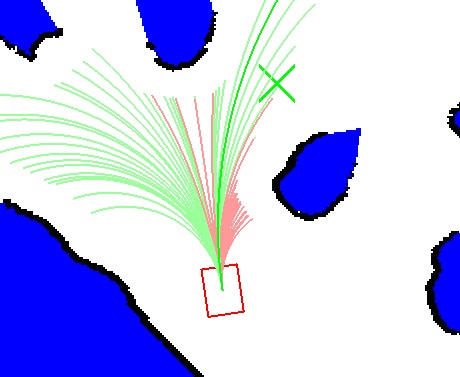
このコンポーネントは静止・移動障害物を回避しながら,指定物体を追う 経路を計画するコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 1.0.0
修正BSDライセンスを適用しています。
豊橋技術科学大学 情報・知能工学系 rtc@aisl.cs.tut.ac.jp 〒441-8580 愛知県豊橋市天伯町雲雀ヶ丘1-1 TEL: 0532-44-6826 URL: http://www.aisl.cs.tut.ac.jp/
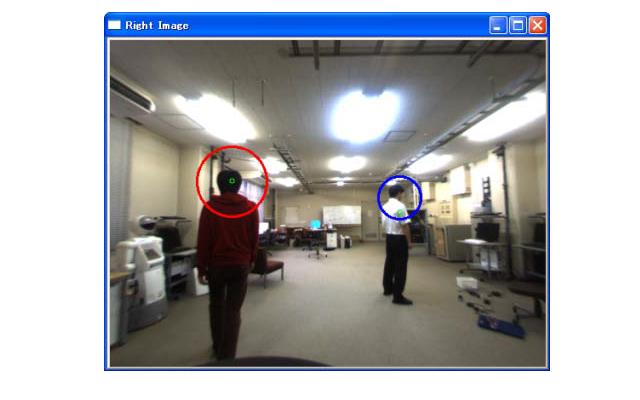
このコンポーネントはステレオカメラ(Bumblebee 2)の情報から人物を 検出し,それぞれの人物の位置と移動速度を出力するコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 1.0.0 ●FlyCapture (配布元:http://www.ptgrey.com/) ●Triclops(配布元:http://www.ptgrey.com/))
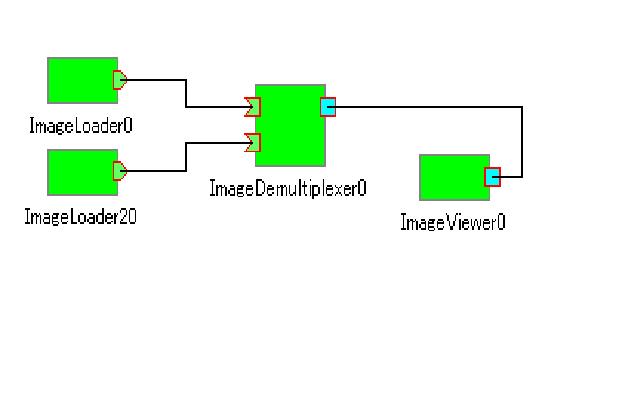
画像をJPEGに変換して転送したり,JPEG画像やOpenCV画像を表示 したりするコンポーネント群です。
下記ライブラリを使用しています。 ●OpenCV 1.0.0 ●JPEG変換にIJGのライブラリ
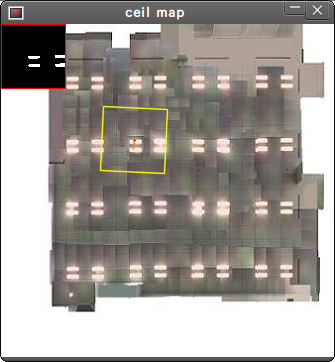
本プログラムはロボットから見える画像と、天井地図のマッチングを常に取ることで自己位置を推定するRTコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 2.0.0
商用以外の利用の場合、BSDライセンスが適用されます。 商用利用の際には、個別に使用条件を検討させて頂きます。 詳しくは、ご連絡をお願い致します。
奈良先端科学技術大学院大学 情報科学研究科 robotics-staff@is.naist.jp 〒630-0192 奈良県 生駒市 高山町 8916-5 Tel: 0743-72-5376, Fax: 0743-72-5379
障害物情報から衝突を判定するコンポーネントです。
- CollisionDetection 障害物検知RTC (OpenRTM-aist 1.0.0-RC1 C++)
・インターフェース等は今後インターフェースの共通化作業に伴い変更される可能性があります。
BSDライセンス
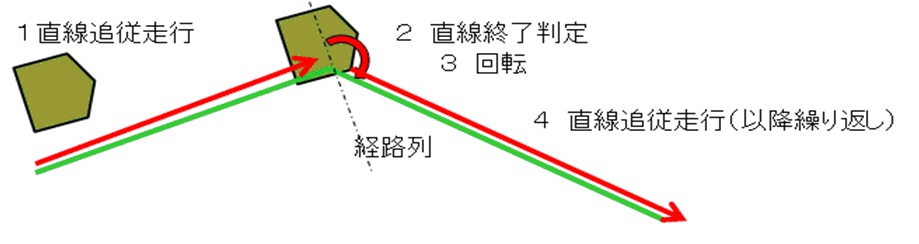
目標経路を追従し経路目的地まで移動するための車体速度情報を出力する自律移動コンポーネントです。
- Navigation 経路走行RTC - PathFollowing 経路追従RTC (OpenRTM-aist 1.0.0-RC1 C++)
BSDライセンス。
障害物情報を用いて障害物回避を行うシンプルなコンポーネント群です。
- ObstacleAvoidance 障害物回避RTC (OpenRTM-aist 1.0.0-RC1 C++)
注意事項) ・測域センサ用障害物検知RTCの利用には人追従機能RTCモジュール群中のUrg Comp が必要です。 ・インターフェース等は今後インターフェースの共通化作業に伴い変更される可能性があります。
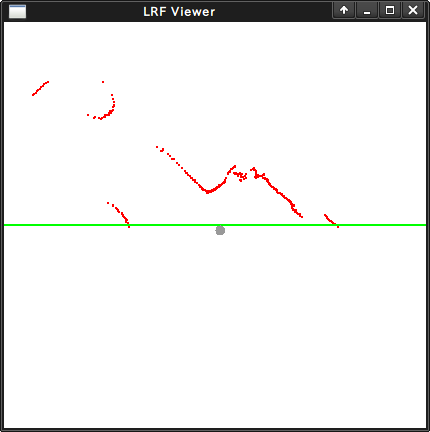
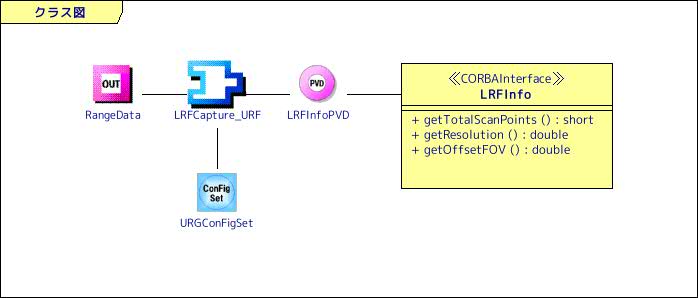
これはLRF描画コンポーネントです。 LRFキャプチャRTCからの距離データを受け取り描画を行います。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


MobileRobots社ロボット用制御RTC
概要
このコンポーネントはMobile Robots 社のロボット用の
制御コンポーネントです。