RT-Component
本コンポーネントはActivateすることによって,UDPでブロードキャストされている環境中のロボットの状況を受信し,接続するロボットを選択することが可能である.接続後はTCPによるソケット通信で目標速度・角速度を送信し,オドメトリの値を受信する.
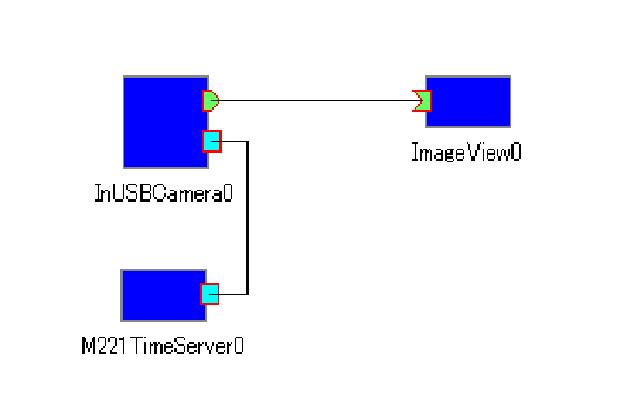
視覚入力コンポーネントは、USBカメラより画像を取得し、取得時間情報を付加して出力します。
下記ライブラリを使用しています。 ●DirectX SDK August 2007 ●Windows SDK Ver.6.0 ●OpenCV2.1(テストコンポーネントにて使用)
修正BSDライセンスを適用しています。
株式会社イーガー 新規事業開発部 kubota@mail.eager.co.jp 〒530-0047 大阪府大阪市北区西天満4-14-3 住友生命御堂筋ビル17F Tel: 06-6360-2050, Fax: 06-6360-2051
Armadilloと北陽電機URGセンサとを組み合わせ、分散センサシステムを簡単に構築するためのユニットです。 Armadillo240上ではURGセンサRTコンポーネントが動作します。
OpenHRP3 で開発したロボット制御コンポーネントを用いて、実ロボットマニピュレータPA10を制御するためのRTコンポーネント。シミュレーションと実機制御との間の移行を完全シームレス化することが可能。
著作権は開発者に帰属します。大学・公的研究機関における教育・研究目的では無償で利用を許可します。商用利用についてはお問い合わせください。
複数のデータベースでコンポーネントを管理する、階層型ソフトウェアアーキテクチャで使用されるデータベースノードコンポーネント(DNC)を構築。 DNCによる一括管理でもタスクシーケンスを簡単に変更できる。
Qtの公開条件およびRTミドルウェアの公開条件に準ずる。
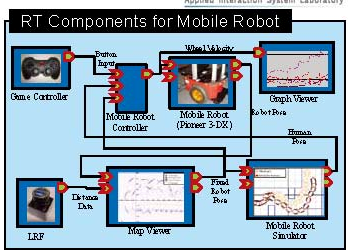
車輪型移動ロボットの開発時に必要な総合開発環境のRTコンポーネント群。移動ロボットを始めて学習・開発を行う人を対象とし、シミュレータにより機器を導入する前から学習を始めることができ、人とのコミュニケーションロボットにおける移動制御モデルの開発を行うことができる。
右図のようにコンポーネント間で必要なデータの入出力を行う。具体的には、制御車輪速度、移動ロボットの推定位置・LRFデータ・人物位置・ポテンシャル法における制御ベクトルなど。
MOBILE ROBOTIS社のAriaライブラリを除き、非商用利用であれば自由に利用可能。
Point Cloud Libraryのコンポーネントラッパー群です。ポイントクラウドの生成、処理及び表示をするコンポーネントを提供します。簡単に新しいポイントクラウド処理コンポーネントを作るためのベースクラスも含めています。他のコンポーネントでポイントクラウドのデータ型を使うために、データ型もIDLをライブラリとして提供します。
拡張現実 (Augmented Reality) システムを容易に実現するためのツールキット:ARToolKit をRTコンポーネント化
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク





移動ロボットのネットワーク化と制御用RTコンポーネント
概要
本コンポーネントはActivateすることによって,UDPでブロードキャストされている環境中のロボットの状況を受信し,接続するロボットを選択することが可能である.接続後はTCPによるソケット通信で目標速度・角速度を送信し,オドメトリの値を受信する.
特徴