RT-Component
修正BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
筑波大学 大学院システム情報工学研究科 aiyama@esys.tsukuba.ac.jp 〒305-8573 茨城県つくば市天王台1-1-1 Tel: 090-3540-5795 FAX: 029-853-6471(専攻事務室)
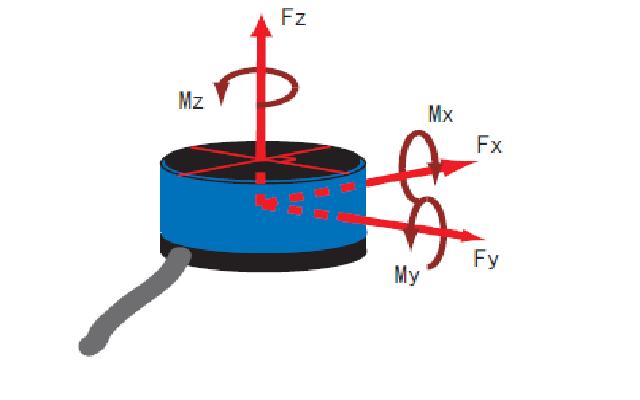
本コンポーネントは、ニッタ株式会社製の力センサ「IFS-70M35A25-M50B」のRTコンポーネントであり、 データポートやサービスポートから力とモーメントを出力します。 対応OS:Vine Linux + ART-Linux で動作を確認済みです。
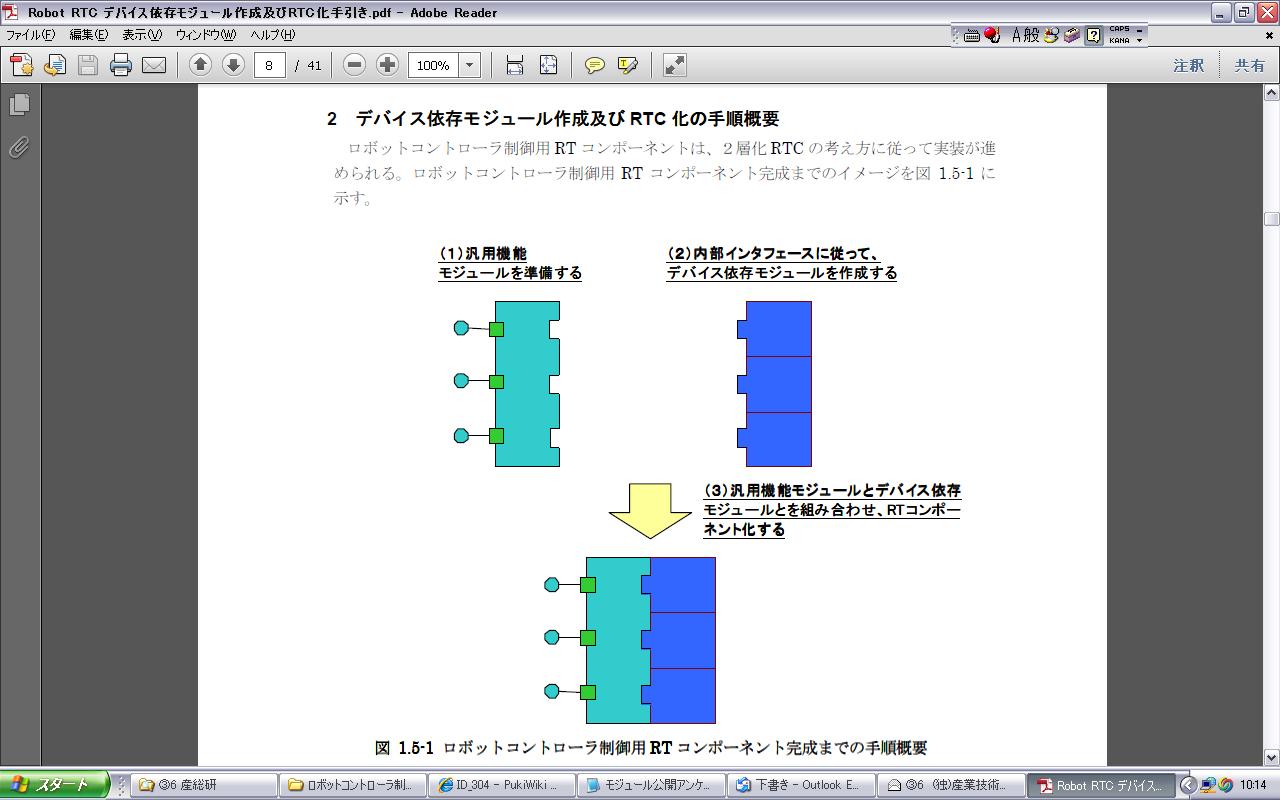
このコンポーネントは、ロボットコントローラ制御用RTCの共通インタフェースモジュールです。ACT共通インタフェース対応版です。
Eclipse Public License v1.0を適用しています。
IDEC株式会社 rtc_support@idec.co.jp
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。 http://code.google.com/p/idec-rtcs/
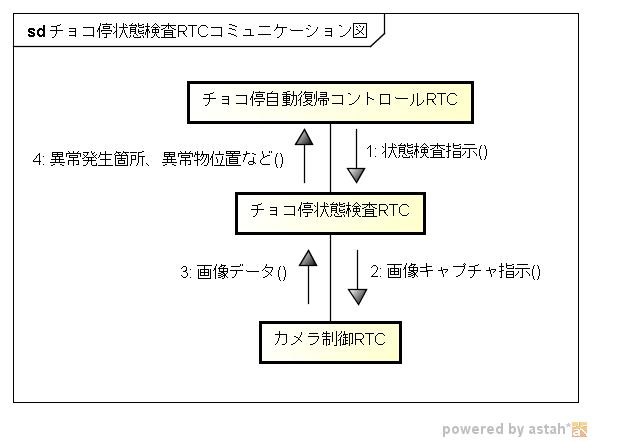
チョコ停自動復帰RTC群は、ロボット制御セル生産システムにおけるチョコ停(軽微な原因による一時的な 停止)に対し、人の手を介さずに自動的に異常状態から復帰することを目的とするRTC群です。 この中で本RTCは、チョコ停発生エリアにおける異常内容の識別から異常物の位置検出を行います。
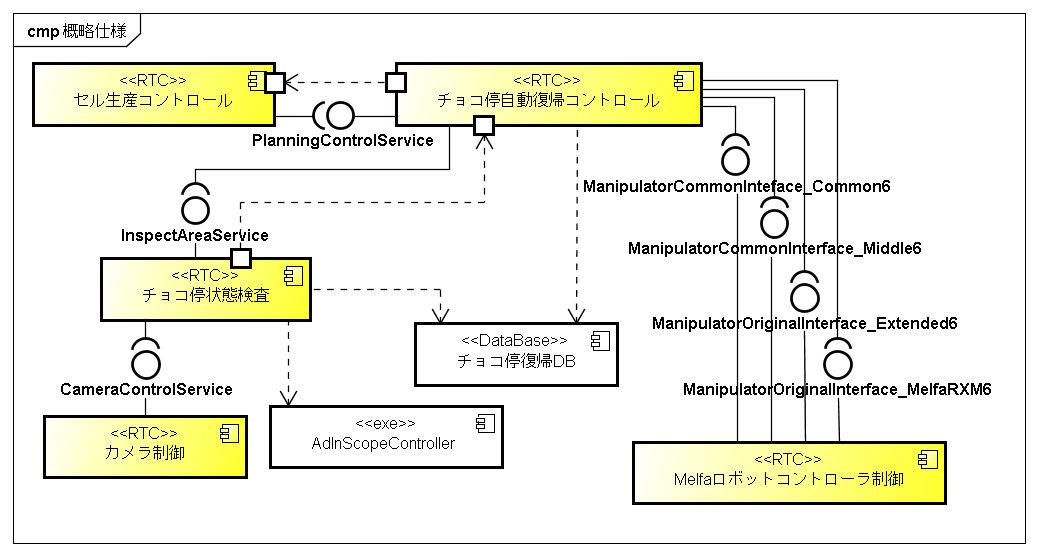
チョコ停自動復帰 RTC群は、ロボット制御セル生産システムにおける チョコ停(軽微な原因による一時的な停止)に対し、人の手を介さずに 自動的に異常状態から復帰することを目的とするRTC群です。 この中で本RTCは、チョコ停状態検査RTC(SENSE)や三菱電機製MelfaRXM 向けロボットコントローラ制御用RTC(ACT)を用いて、異常状態からの 復帰を行う。
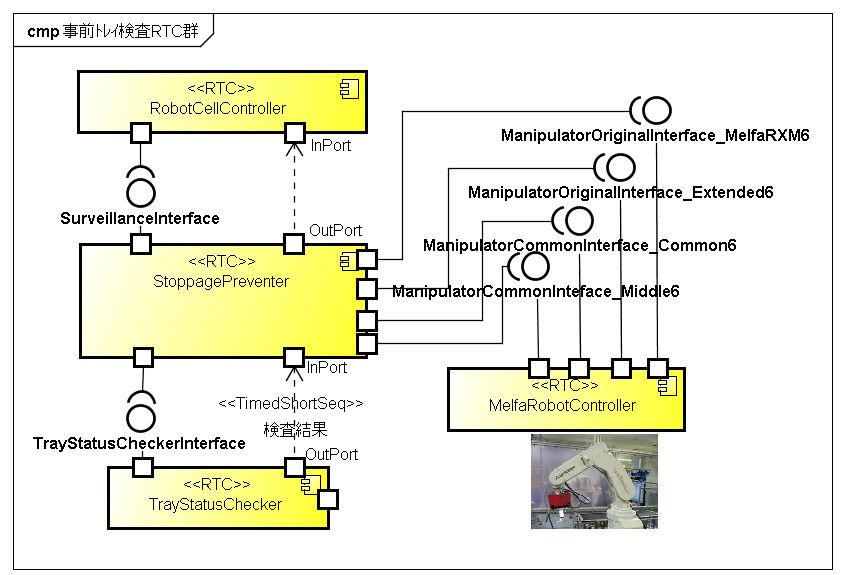
本RTコンポーネントは、ロボット制御セル生産システムにおいて、システム 状態を監視し、指定のタイミングで、事前トレイ検査等のチョコ停回避制御を 起動する。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
ロボット動作モニタコンポーネント
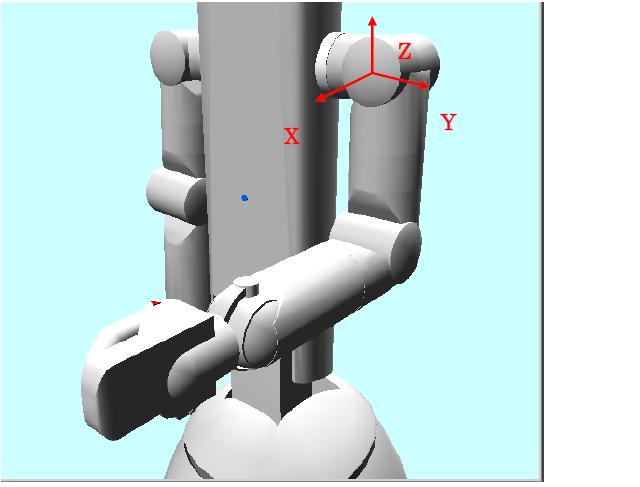
概要
本コンポーネントは、ロボットの三次元モデルをディスプレイに表示する機能を持つ コンポーネントです。注意事項
●コンパイルにはGLUTのインストールが必須となります。ライセンス
修正BSDライセンスを適用しています。
詳しくは、ご連絡をお願い致します。
連絡先
筑波大学 大学院システム情報工学研究科
aiyama@esys.tsukuba.ac.jp
〒305-8573 茨城県つくば市天王台1-1-1
Tel: 090-3540-5795 FAX: 029-853-6471(専攻事務室)