Eclipse Public License v1.0を適用しています。
IDEC株式会社 rtc_support@idec.co.jp
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。 http://code.google.com/p/idec-rtcs/
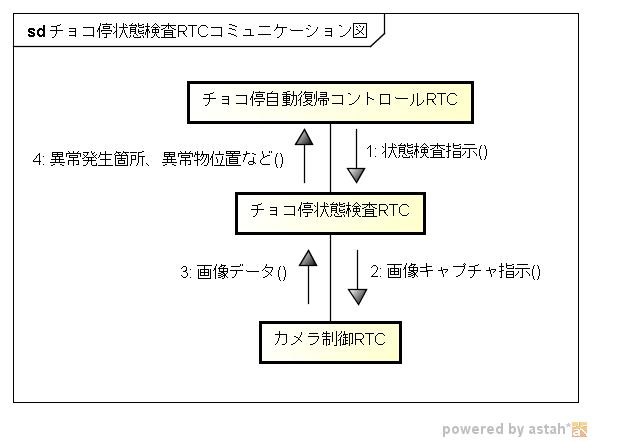
チョコ停自動復帰RTC群は、ロボット制御セル生産システムにおけるチョコ停(軽微な原因による一時的な 停止)に対し、人の手を介さずに自動的に異常状態から復帰することを目的とするRTC群です。 この中で本RTCは、チョコ停発生エリアにおける異常内容の識別から異常物の位置検出を行います。
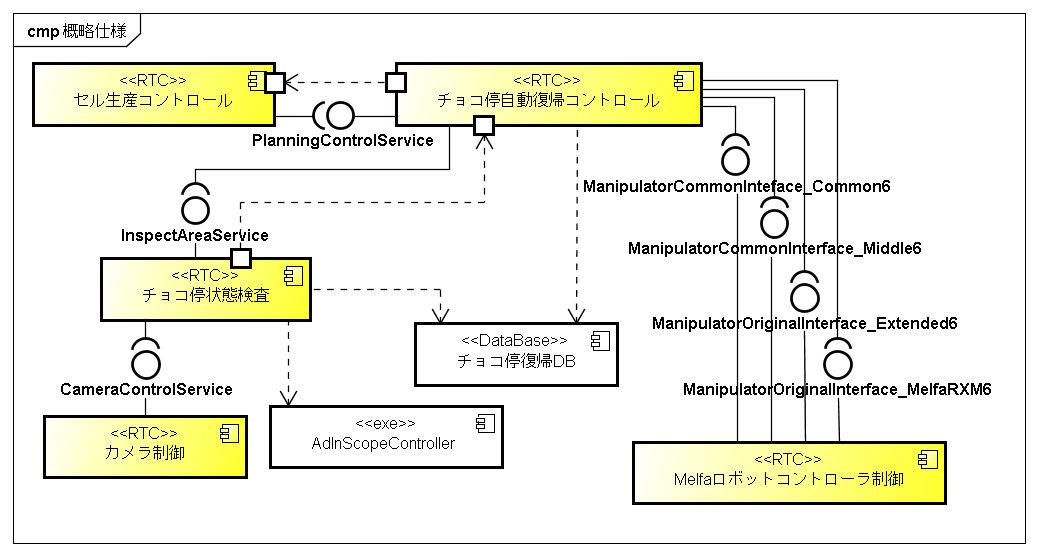
チョコ停自動復帰 RTC群は、ロボット制御セル生産システムにおける チョコ停(軽微な原因による一時的な停止)に対し、人の手を介さずに 自動的に異常状態から復帰することを目的とするRTC群です。 この中で本RTCは、チョコ停状態検査RTC(SENSE)や三菱電機製MelfaRXM 向けロボットコントローラ制御用RTC(ACT)を用いて、異常状態からの 復帰を行う。
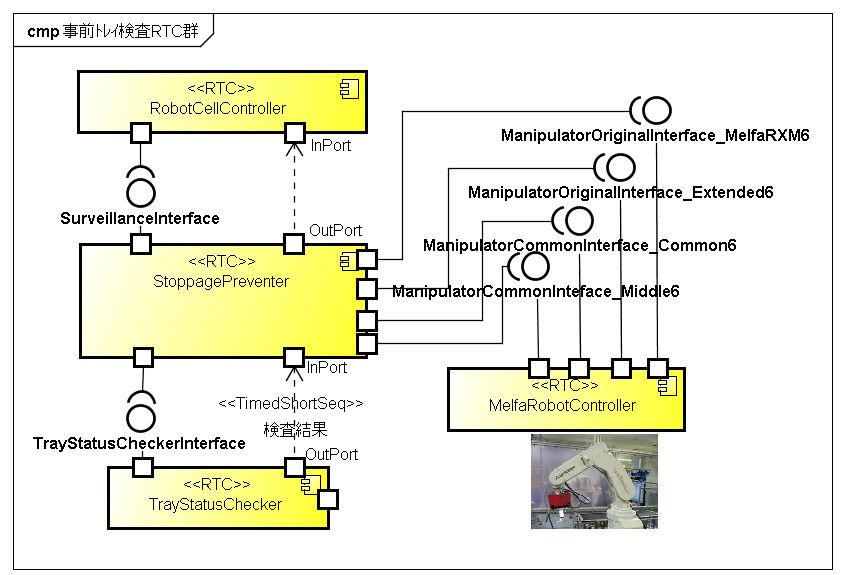
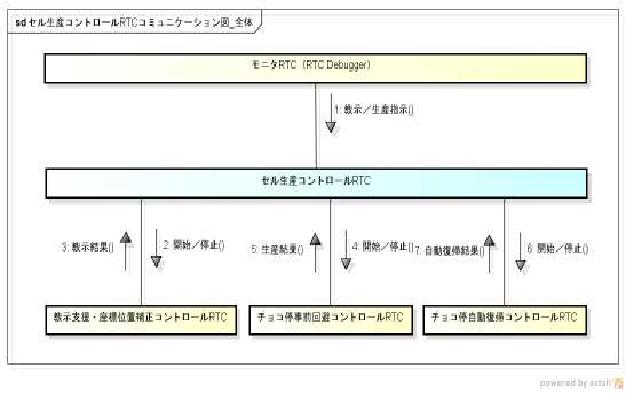
本RTコンポーネントは、ロボット制御セル生産システムにおいて、システム 状態を監視し、指定のタイミングで、事前トレイ検査等のチョコ停回避制御を 起動する。
本RTコンポーネントは、ロボット制御セル生産システムにおける「教示」と 「生産」の2つの状態を制御する機能を有する。
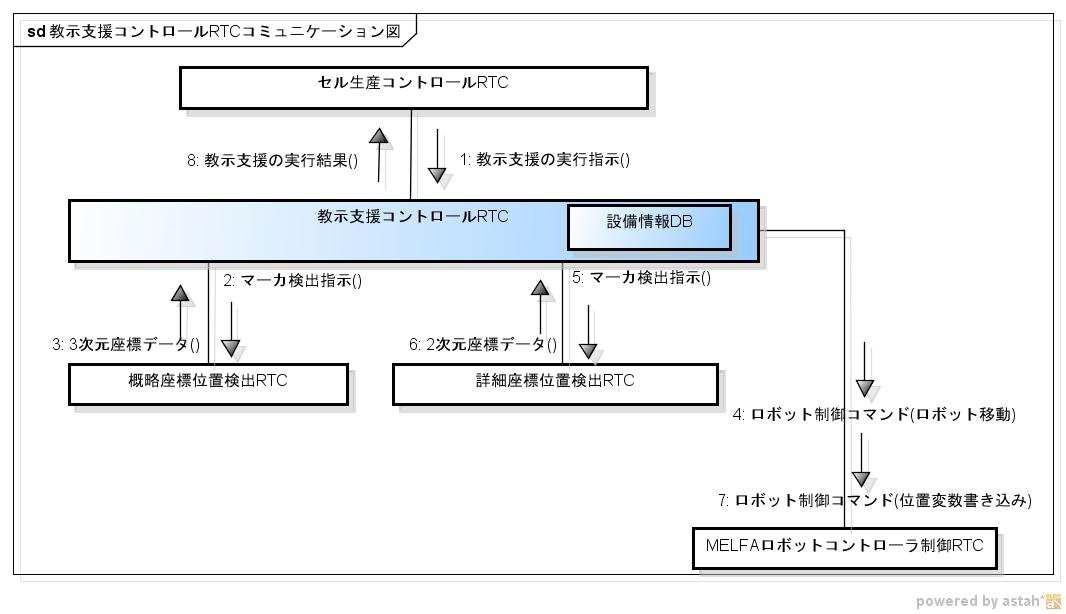
このコンポーネントは、データポートより、部品トレイ上のマーカ座標を読み込んで、そのマーカ座標と設備情報から、各部品の座標を算出して、その座標をロボットコントローラのロボット位置変数へ書き込む機能を有する。
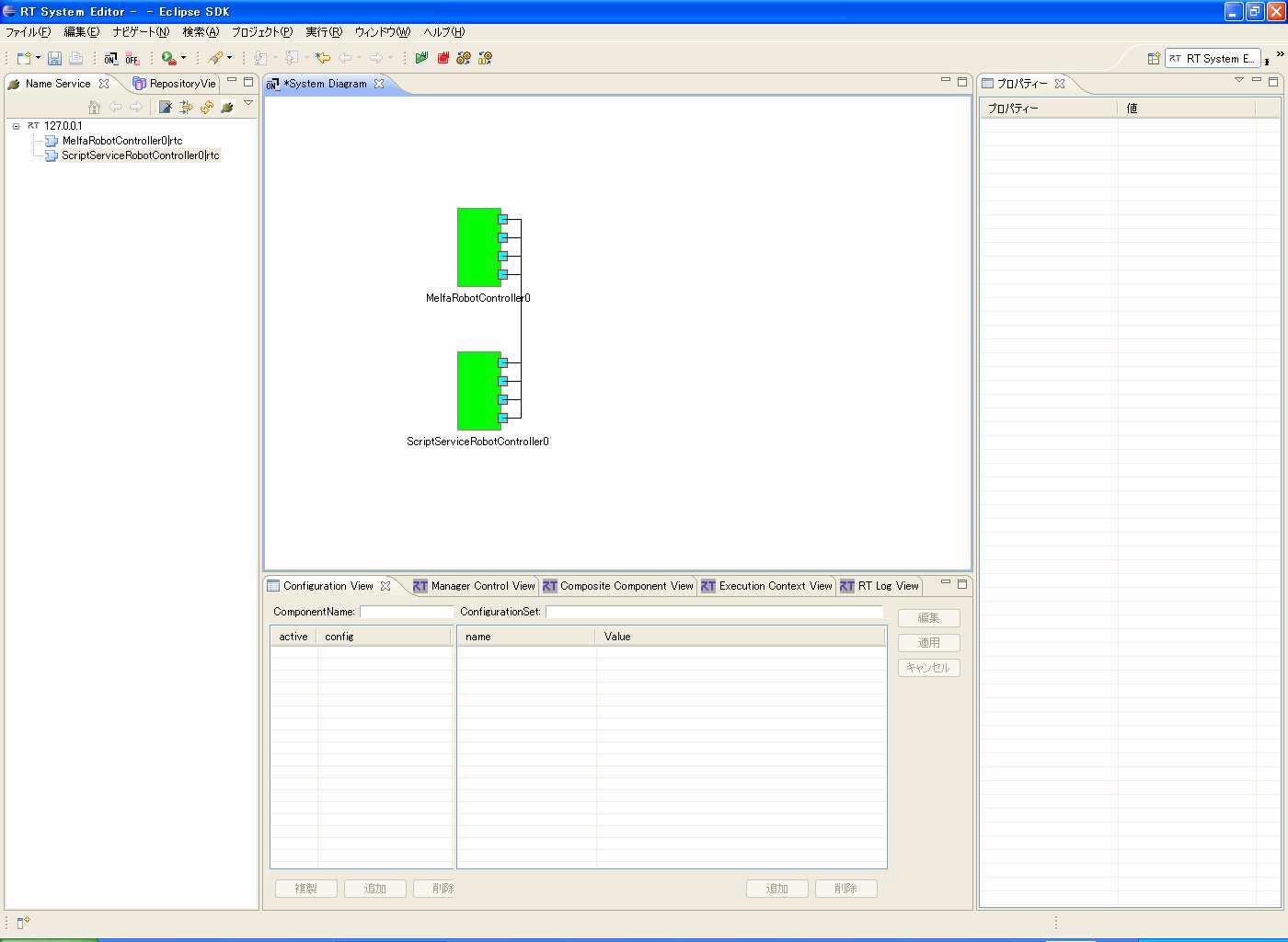
このコンポーネントは、三菱電機製MelfaRXM向けのロボットコントローラ制御用RTCです。ACT共通インタフェース対応版です。
BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
(特)国際レスキューシステム研究機構 fujinaga@rescuesystem.org 〒653-0042 神戸市長田区二葉町7-1-18地域人材支援センター1階 Tel:078-641-2840 Fax:078-641-2841 URL:http://www.rescuesystem.org
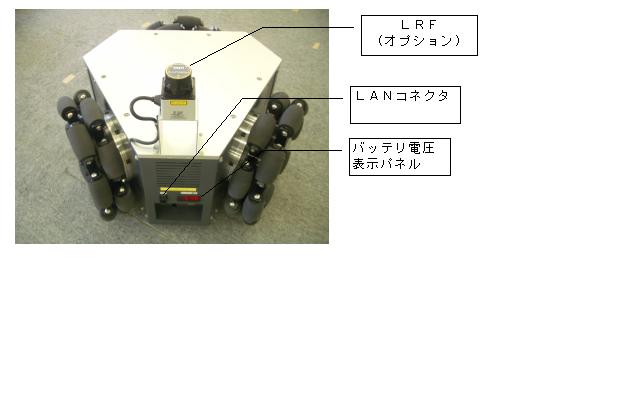
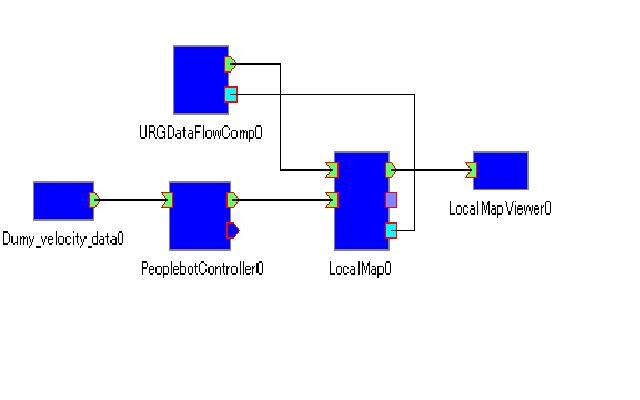
このコンポーネントはMobile Robots 社のロボット用の 制御コンポーネントです。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
三菱重工製PA10ロボットコントローラ制御
概要
このコンポーネントは、三菱重工製PA10向けのロボットコントローラ制御用RTCです。ACT共通インタフェース対応版です。ライセンス
Eclipse Public License v1.0を適用しています。
連絡先
IDEC株式会社
rtc_support@idec.co.jp
Download
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。
http://code.google.com/p/idec-rtcs/