Download
latest Releases : 2.0.0-RELESE
| 2.0.0-RELESE | Download page |
Number of Projects
| RT-Component | 153.5 |
| RT-Middleware | 35 |
| Tools | 22 |
| Documentation | 2 |
Choreonoid
Motion editor/Dynamics simulator
OpenHRP3
Dynamics simulator
OpenRTP
Integrated Development Platform
AIST RTC collection
RT-Components collection by AIST
TORK
Tokyo Opensource Robotics Association
DAQ-Middleware
Middleware for DAQ (Data Aquisition) by KEK
異種ミドルウェア相互運用のための座標変換コンポーネントの開発
目的
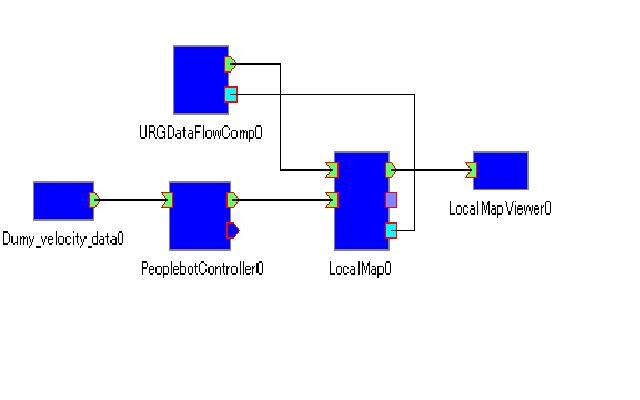
異種ミドルウェアの相互運用とコンポーネントの再利用性向上を図るためにRTCの座標系管理を一括で行う座標系管理RTCを作成するシステム概要
他のコンポーネントから入力される座標系に関するデータを座標変換し,出力するコンポーネント仕様