RT-Component
RTC-CANopenを利用する上でのリファレンスとするために開発したロボット(リファレンス ロボット)を操作するモジュール群です。
●リファレンスロボットはテクノクラフト社のBeegoを対象に設計してあります。 ●リファレンスロボットの実行にはRTC-CANopenが必要となります。
・RTC-CANopenリファレンスマニュアルの著作権は,芝浦工業大学水川研究室に 帰属します。 ・これらのコンポーネント群は,非営利目的での使用及び改変自由ですが,商用利用の 場合は別途ご相談下さい。 なお,本モジュール群を使用して発生したいかなる障害についても責任を負いません。
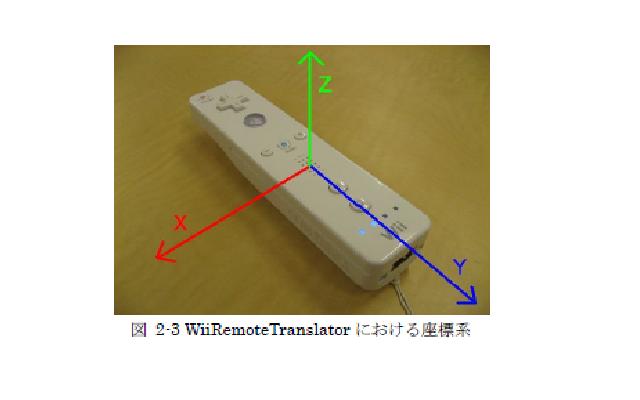
Wiiリモンコン用のコンポーネントで,ボタンや加速度のデータを 取得できます。また,ヌンチャクやクラシックコントローラなどの 拡張コントローラに対応していますています。
・マイクロソフト株式会社より提供されているWindows 用のデバ イスドライバ開発キット(WDK)のソースコード及びライブラリを 除き,WiiRemoteComponentsの著作権は,芝浦工業大学水川研究室に帰属します。 ・芝浦工業大学水川研究室が著作権を持つRTコンポーネントは,非営利目的での 使用及び改変自由ですが,商用利用の場合は別途ご相談下さい。 なお,本作品を使用して発生した,いかなる損害についても責任を負いません。
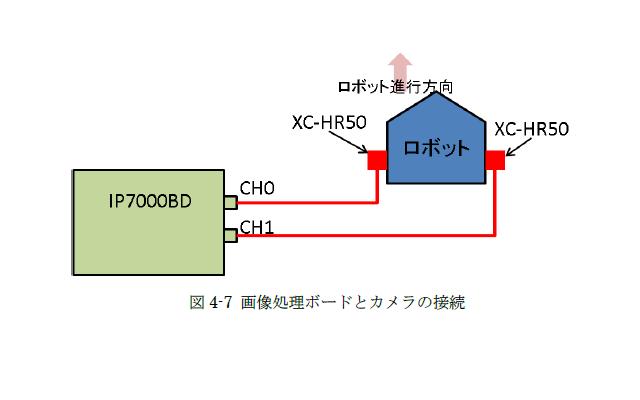
DFITコンポーネントは,ロボットの横に装着した2台のカメラから路面 画像を取得,それぞれの路面がどれだけ動いたかを測定し,その 結果より相対的なロボットの自己位置を推定するRTコンポーネント です。
・DFITコンポーネントの著作権は,芝浦工業大学ヒューマン・ ロボット・インタラクション研究室に帰属します。 但し,IP7000BDを制御するソースコード及びライブラリの著作権は, 開発元の”日立情報制御ソリューションズ”にあります。 ・芝浦工業大学水川研究室が著作権を持つRTコンポーネントは,非営利目的での 使用及び改変自由ですが,商用利用の場合は別途ご相談下さい。 なお,本作品を使用して発生した,いかなる損害についても責任を負いません。
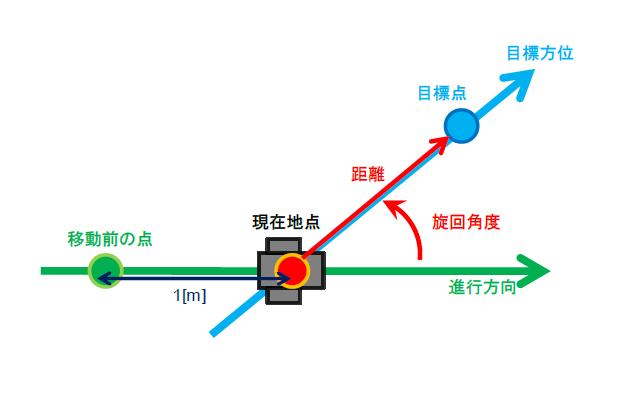
GPSから受信したデータをもとに,ロボットのナビゲーションのために 必要な処理を行うコンポーネントであり,現在地点から目標点への 距離・旋回角度の出力を行います。
・GPSナビゲーションコンポーネントに関する著作権は,芝浦工業 大学ヒューマン・ロボット・インタラクション研究室に帰属します。 ・芝浦工業大学水川研究室が著作権を持つRTコンポーネントは,非営利目的での 使用及び改変自由ですが,商用利用の場合は別途ご相談下さい。 なお,本作品を使用して発生した,いかなる損害についても責任を負いません。
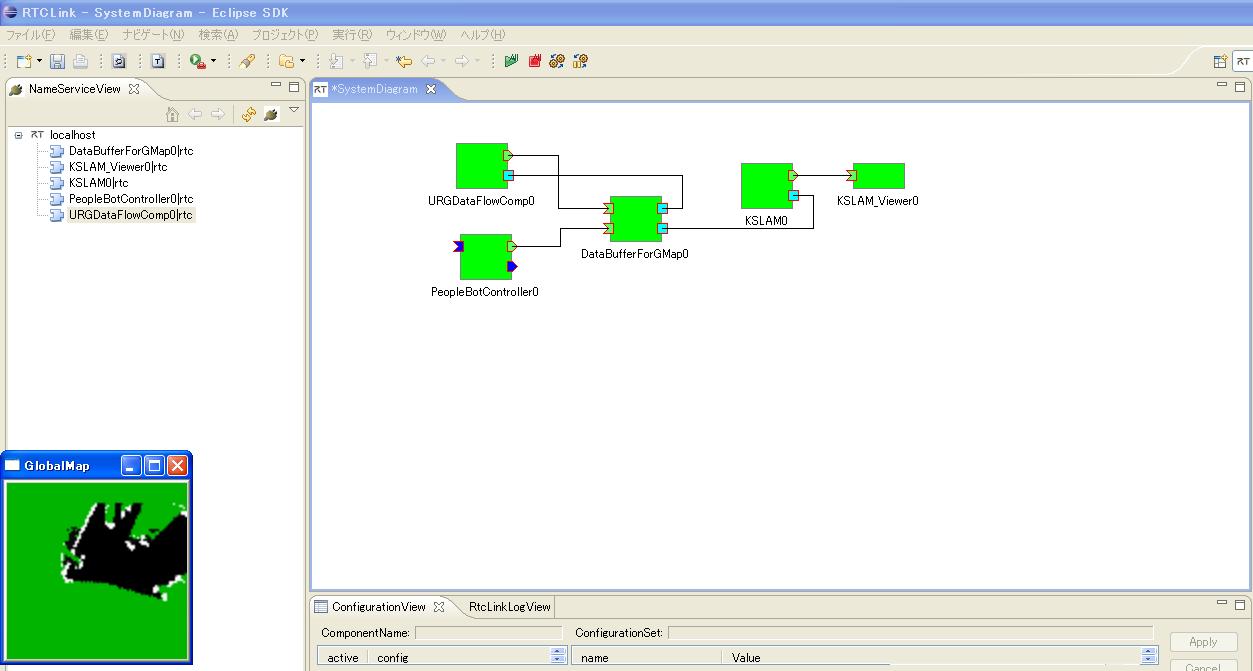
このコンポーネントは、独自手法の大域地図の生成・表示を行うコンポーネント群です。
下記ライブラリを使用しています。 ●OpenRTM1.0.0用では、OpenCV 2.1 ●OpenRTM0.4.x用では、OpenCV 1.0
修正BSDライセンスを適用しています。
修正BSDライセンスを適用しています。 詳しくは、ドキュメントに同梱の"license.pdf"をご覧ください。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
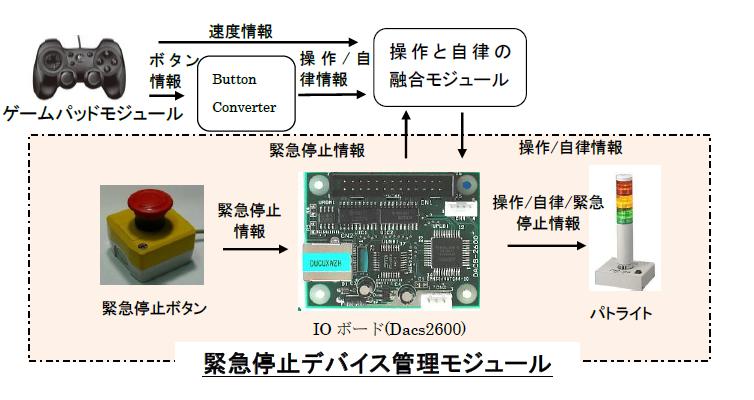
RTC-CANopenリファレンスロボット
概要
RTC-CANopenを利用する上でのリファレンスとするために開発したロボット(リファレンス
ロボット)を操作するモジュール群です。
注意事項
●リファレンスロボットはテクノクラフト社のBeegoを対象に設計してあります。
●リファレンスロボットの実行にはRTC-CANopenが必要となります。
ライセンス
・RTC-CANopenリファレンスマニュアルの著作権は,芝浦工業大学水川研究室に
帰属します。
・これらのコンポーネント群は,非営利目的での使用及び改変自由ですが,商用利用の
場合は別途ご相談下さい。
なお,本モジュール群を使用して発生したいかなる障害についても責任を負いません。