作業知能モジュール群
ステレオカメラキャリブレーションコンポーネント
概要
本コンポーネントは,CameraImage型でステレオカメラの両眼画像を取得し,内部パラメータ,外部パラメータを推定するためのコンポーネントです。
注意事項
以下のパッケージの追加インストールが必要になります。●opencv2.2
●RTMEXTenderが必要です。詳細は
http://www.jsk.t.u-tokyo.ac.jp/~h-yaguchi/rtmext/
を参照してください。
ライセンス
修正BSDライセンスに基づき配布されます。詳しくは、LICENSE.txtファイルをご覧ください。
連絡先
東京大学 知能機械情報学専攻 情報システム工学研究室itngr@jsk.t.u-tokyo.ac.jp
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| Rev.1 | 1.0.0 | Ubuntu | C++ | StereoCameraCalibration.tar.gz | README.txt | 2011.11.24 |
USBカメラコンポーネント(共通)
概要
共通カメラIFに準拠したカメラ画像取得コンポーネントです.
ライセンス
修正BSDライセンスを適用しています.
開発バージョン
リンク先参照
連絡先
奈良先端科学技術大学院大学 情報科学研究科
robotics-staff@is.naist.jp
〒630-0192 奈良県 生駒市 高山町 8916-5
Tel: 0743-72-5371, Fax: 0743-72-5379
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
双腕協調制御RTC
概要
右手先位置・姿勢6自由度,左手先位置・姿勢6自由度の
合計12自由度を操作することで対象物の位置・姿勢の6自由度,
または対象物に与える外力・外モーメントの6自由度,
右手と左手の相対位置・姿勢偏差の6自由度,または対象物に
与える内力・内モーメントの6自由度の合計12自由度を制御可能。
どれを制御するかは選択行列Sで決定。
ライセンス
EPLライセンスを適用しています。
開発バージョン
ただいま、準備中。しばらくお待ちください。
連絡先
東北大学大学院工学研究科
〒980-8579 仙台市青葉区荒巻字青葉6-6-01
近野 敦
email:konno@space.mech.tohoku.ac.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
単眼位置姿勢計測・表示モジュール
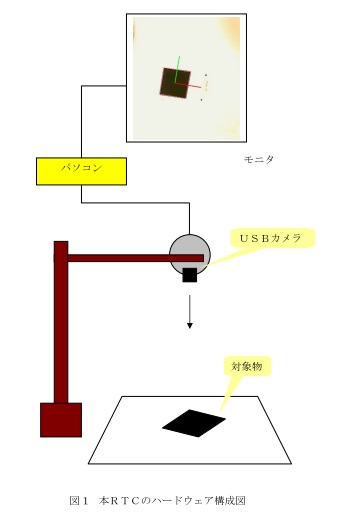
概要
単眼のUSBカメラを使って、多角形マーカの画像を撮影し
その位置・姿勢を計測し表示するモジュールである。
マーカとして、四角形、六角形、凸形、凹形を用意した。
位置・姿勢出力は、センス系統一IFに準拠したものであり
ロボットアームをコントロールする相対位置決めモジュールと連結できる。
表示には、マーカの実写画像に姿勢ベクトルのCG画を重畳させたり
ロボットの手先方向を表示させたりする機能を設けた。
ライセンス
バイナリーを無償提供とさせて頂きます。
詳しい内容については、下記へご連絡願います。
連絡先
株式会社 東芝
研究開発センター 機械・システムラボラトリー
〒212-8582 川崎市幸区小向東芝町1
Tel :044-549-2193
Email:atsushi.sugahara@toshiba.co.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 1.0 | 1.0.0 | WindowsXP | C++ | MarkerRecogRTC.zip | MarkerRecogDoc.zip | 2011.04.11 |
把持物体教示RTC
概要
共通カメラインタフェースに対応したバーコードリーダコンポーネント群です。
注意事項
下記ライブラリを使用しています。
●OpenCV 2.x (※)
●ARToolKitPlus-2.1.5
※OpenCV-2.2はARToolKitPlus?-2.1.5と干渉するので使えません。
ライセンス
OpenRTM-aist-1.0 のライセンスに準じます。
連絡先
独立行政法人 産業技術総合研究所
知能システム研究部門 サービスロボティクス研究グループ
〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二
Tel/Fax:029-861-3427/029-862-3493
email: srrg@m.aist.go.jp
Download
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
作業対象物認識モジュール
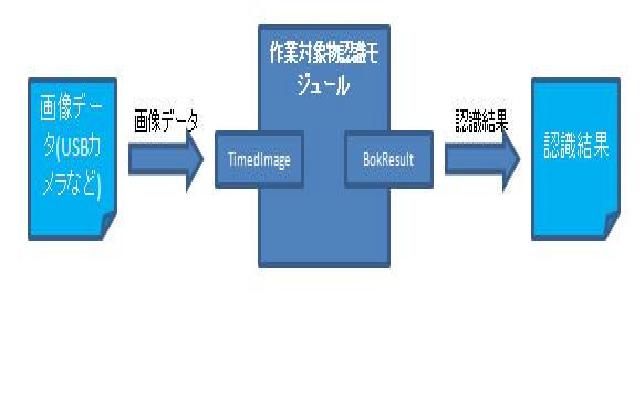
概要
本モジュールは、入力された画像に対してBagOfKeypoints法を使用し、
作業対象物を認識し、認識した対象物と確度を出力するモジュールです。
注意事項
下記ライブラリを使用しています。●OpenCV 2.0
●SDL (Simple DirectMedia Layer)
●Ruby 1.8.7 http://ruby-lang.org/ja/
ライセンス
EPLライセンスを適用いたします。連絡先
東北大学大学院工学研究科 機械システムデザイン工学専攻konno@space.mech.tohoku.ac.jp
〒980-8579 仙台市青葉区荒巻字青葉6-6-01
Tel: 022-795-6972, Fax: 022-795-6971
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 1 | 1.0.0 | Ubuntu | C++/Python | bag_of_keypoints_module-20110303.zip | document-bag_of_keypoints_module.pdf | 2011.04.08 |
頭部ステレオカメラを用いた双腕ロボットによるマニピュレーション作業

概要
本システムは双腕ロボットを用いて工場での部品整理をイメージしたサービスを行うシステムである。
具体的には、作業台に置かれた部品を状況に応じて再配置し、個々の部品を検出して
双腕を活かして箱に整理して入れ、双腕で別の場所に運ぶPick&Place作業を行うものである。
システムソフトウェアは頭部ステレオカメラによる部品認識・双腕ロボットでの作業計画・ロボット動作を
行うための RTC 群で構成される。
関連モジュール
オープンソース版作業対象認識モジュール群 「OpenVGR」
オープンソース版作業対象認識モジュール群 座標系変換ツール「OpenVGRextra」
オープンソース版作業対象認識モジュール群 作業システム対応用ファイル(hiro.tar.gz)
graspPlugin for Choreonoid
HiroNXInterface
ドキュメント
README
README-OpenVGRforHiro
サービス動作機能仕様書
双腕ロボットデモ手順書
デモ映像
共通I/F 仕様書
本システムにおける、カメラ機能部、作業系画像認識部、双腕ロボット制御部のI/Fは
相互接続性や相互運用性を確保できるよう共通化を行っている。
共通I/F 仕様書
連絡先
独立行政法人 産業技術総合研究所
知能システム研究部門 タスクビジョン研究グループ
〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二
email: nedo-vms-contact@m.aist.go.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
人発見モジュール(stereo camera)
概要
本プログラムはステレオカメラからの情報を基にした対人追従コンポーネントです。
ColorImageウィンドウには入力された画像が表示されます。
Enterキーを入力することでウィンドウの画像が固定されます。
画像を固定した状態で,マウスドラッグ(左クリック)で追跡対象者の領域を選択することで
ロボットのローカル座標系での対象の位置を出力します。
選択された領域はtempウィンドウに表示されます。
入力画像のサイズは320x240pixelです。
出力の型は自己定義のTimedXYDouble,TimedOdometryなどを使用しています。
ご利用の際はご注意ください。
ライセンス
修正BSDライセンスを適用しています。
詳しくは、ご連絡をお願い致します。
連絡先
東京理科大学大学院
理工学研究科 機械工学専攻 溝口研究室
〒278-8510 千葉県野田市山崎2641
Tel:04-7124-150
email:hm@rs.noda.tus.ac.jp, takemura@rs.noda.tus.ac.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
Download
| Ver | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 2.0 | 1.0.0 | Ubuntu | C++ | HumanDetecCamera.zip | HumanDetecCamera_readme.zip | 2011.11.29 |
発話推定モジュール
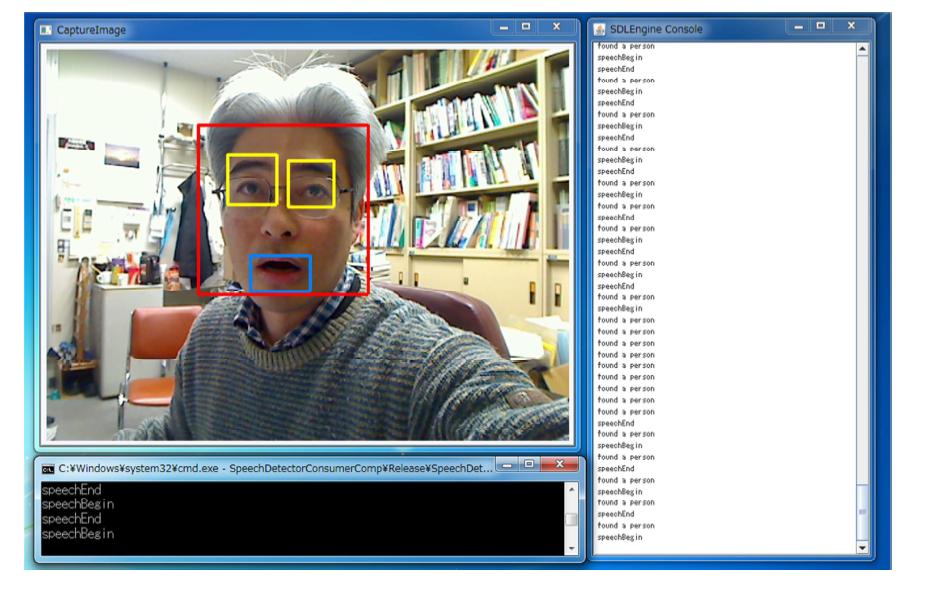
概要
口の動きなどから発話しているかどうかを判断するモジュールです。OpenCVを利用しています。OpenCVに接続されているUSBカメラなどの
キャプチャーデバイスから画像を取得し、発話しているかどうかを推定し、
認識結果を出力します。
注意事項
下記ライブラリを使用しています。●OpenCV 1.0
ライセンス
EPLライセンスを適用します。 連絡先
九州工業大学情報工学研究院生命情報工学研究系ohashi@bio.kyutech.ac.jp
TEL/FAX 0948-29-7821/7801
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 2.0 | 1.0.0 | WindowsXP | C++ | SpeechDetector.2.0.zip | SpeechDetector_Doc.zip | 2012.01.24 |
詳細座標位置検出RTC
概要
このコンポーネントは、画像ファイルを読み込んで、画像データ上の教示用の補助マーク1点を検出して、ロボット座標系におけるマーカの2次元座標で算出する。
ライセンス
Eclipse Public License v1.0を適用しています。
連絡先
IDEC株式会社
rtc_support@idec.co.jp
Download
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。
http://code.google.com/p/idec-rtcs/