作業知能モジュール群
動作習熟(振動抑制)モジュール
概要
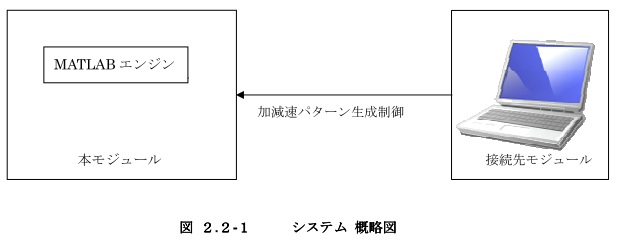
水平2関節ロボットアームの台形則加減速パターンを整形して停止時の
残留振動を抑制する加減速パターンを生成する。
ライセンス
商用利用については、実行形式で有償提供とさせて頂きます。
詳しい内容については、下記へご連絡願います。
連絡先
三菱電機株式会社
先端技術総合研究所 業務部 技術情報課
http://www.MitsubishiElectric.co.jp/corporate/randd/inquiry/index_at.html
お問い合わせ窓口)
ATC_webmaster@ra.MitsubishiElectric.co.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
概略座標位置検出RTC
概要
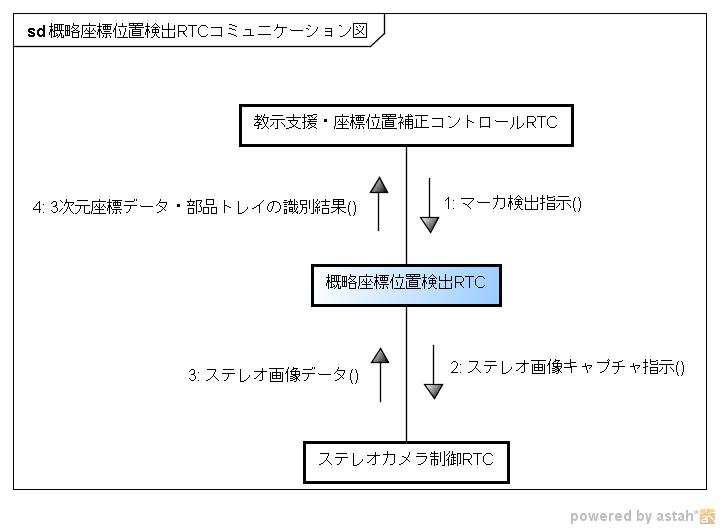
このコンポーネントは、ステレオ画像上より、マーカの座標を検出してマーカ配置パターンを識別する。
ライセンス
Eclipse Public License v1.0を適用しています。
連絡先
IDEC株式会社
rtc_support@idec.co.jp
Download
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。
http://code.google.com/p/idec-rtcs/
MobileHIRO操作用統合環境
概要
MobileHIRO操作用統合環境は移動型双腕ロボットMobileHIROを実機およびシミュレータ(Choreonoid)上で動作させるための統合環境です。
この統合環境では、移動型双腕ロボットMobileHIROの移動・把持動作の計画作成を行い、計画に基づいた指令を実際のロボットへ送信し作業を行わせることを目的としています。
本システムを利用することで、MobileHIROを以下の2つのステップで運用することが可能となります。
- 3Dモデルによる移動・把持動作計画を作成し計画の確認を行う。
- 移動・把持計画をMobileHIROに送信しロボットの動作検証を行う。
ダウンロード
公開準備中
特徴
本システムには以下のような特徴があります。
- 3Dモデルで確認し作成した動作計画をそのまま実機のMobileHIROに動作指令として出力することができる(図 2 1)。
- 実機のMobileHIROのない場合でも、3Dモデル上でMobileHIRO動作計画の作成・確認を行うことができる。
- 双腕部の動作計画と移動台車部の動作計画を同時に計画することができる。(参照:図 2 2 MobileHIRO実機なしでの利用)
- 共通I/F(「2.3拡張性について」にて記載)を利用することで、共通I/Fを利用する機器であれば利用する双腕部・カメラ部・移動台車部の機器を変更することができる。
 図1 MobileHIRO統合環境概要
図1 MobileHIRO統合環境概要

システム構成要素
MobileHIRO操作用統合環境を構成する要素の詳細を記載する。MobileHIROの実機を利用しない基本構成とMobileHIRO実機を利用する構成それぞれについて構成要素を記載する。
MobileHIRO操作用統合環境(基本構成)
本構成で使用する要素の一覧を次表にて記載する。
| No. | 名前 | 種類 | 説明 |
| ① | VisionPC | 計算機 | 後述するソフトウェアChoreonoidを起動するPC。OSはUbuntuLinuxを使用する。MobileHIRO操作用統合環境は本PC上で稼動することとなる。 |
| ② | Choreonoid | ソフトウェア | ロボット動作計画作成ソフトウェア。3D空間上で実際のロボットを模した3Dモデルを操作し、ロボットの動作計画を作成することができる。プラグインを追加可能なフレームワークを備えているため、目的に応じてプラグインを開発することで機能の拡張が行える。 |
| ③ | GraspPlugin | ソフトウェア | Choreonoidにロボットの把持計画を算出する機能を持たせるプラグイン。GraspPluginは、アームの先端にハンドが取り付けられた構成のロボットシステムに対して、把持計画、軌道計画、作業計画など、種々の計画問題を解くことが出来る。また、算出した計画を実際のMobileHIRO上腕部に送信することができる。 |
| ④ | VehiclePlugin | ソフトウェア | Choreonoidにロボットの移動計画を算出する機能を持たせるプラグイン。また、算出した計画を実際のMobileHIRO移動台車部に送信することができる。 |
| ⑤ | Robot/Object | データファイル | Choreonoidが利用する3Dモデル。本環境ではMobileHIROを模した3Dモデルが用意されている。 |
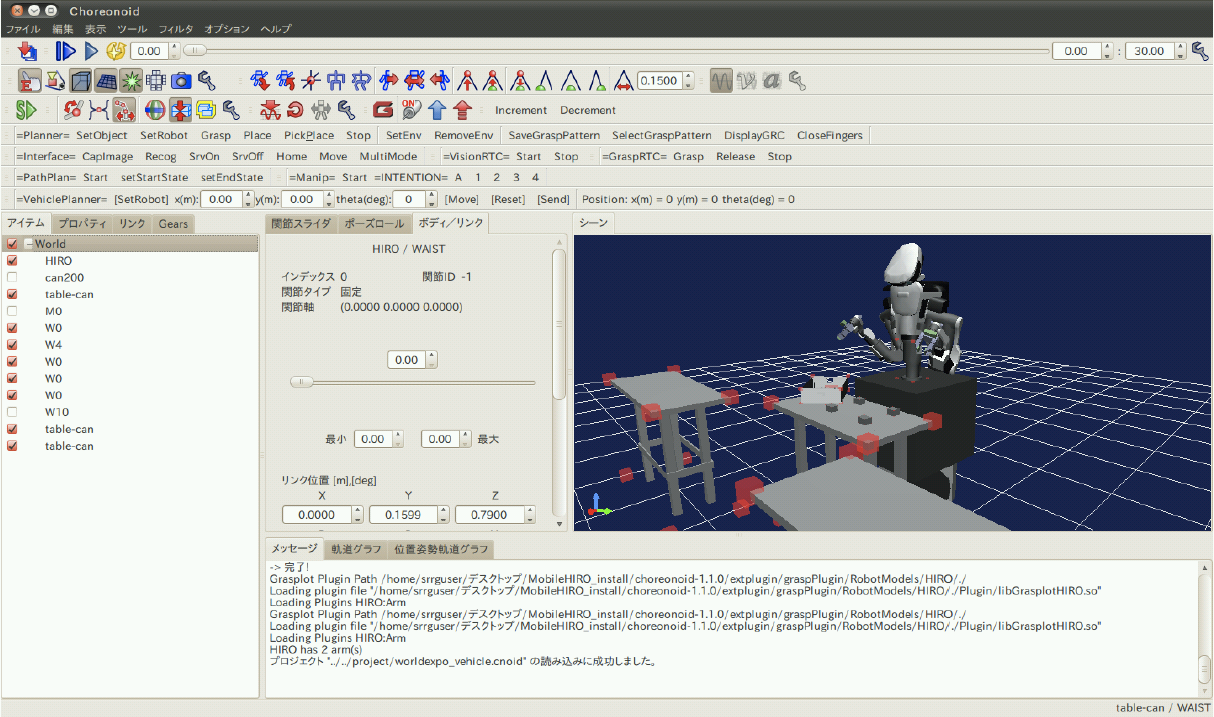
本構成では、1台の①UbuntuLinuxPC(VisionPCと呼称)にて、動作計画作成ソフトウェアである②Choreonoidをユーザが操作することで、MobileHIROの動作計画を作成する。MobileHIRO操作用統合環境で使用する②Choreonoidは、③GraspPluginと④VehiclePluginと呼ばれるプラグインにより、機能拡張が行われている。ユーザは把持計画作成のために③GraspPluginが機能拡張した②Choreonoid上のボタンを操作し把持計画を作成する。同様に移動計画作成のために④VehiclePluginが機能拡張した②Choreonoid上のボタンを操作し移動計画を作成する。 計画作成時に②Choreonoid上の⑤3Dモデルが計画に応じてアニメーション動作するため、ユーザは計画の確認をすることができる(図 3)。

本構成の環境構築手順・具体的な操作については、ドキュメント「3.MobileHIRO操作用統合環境利用手順」を参照してください。
実機使用構成
MobileHIRO統合環境は、次表の要素を利用する。
| No. | 名前 | 種類 | 説明 |
| ① | VisionPC | 計算機 | Choreonoidを起動するPC。OSはUbuntuLinuxを使用する。本構成では、MobileHIRO双腕部(HIRO/NEXTAGE)内に設置されているPCをそのまま利用しChoreonoidを起動する。 |
| ② | Choreonoid | ソフトウェア | 基本構成と同様。表 1にて記載。 |
| ③ | GraspPlugin | ソフトウェア | 基本構成と同様。表 1にて記載。 |
| ④ | VehiclePlugin | ソフトウェア | 基本構成と同様。表 1にて記載。 |
| ⑤ | Robot/Object | データファイル | 基本構成と同様。表 1にて記載。 |
| ⑥ | IEEE1394カメラ | 計算機 | MobileHIRO頭部に設置されているカメラ。 |
| ⑦ | HIRO/NEXTAGE | 計算機 | MobileHIRO双腕部を構成するロボット。内部にはPC(VisionPC)が備え付けられている。 |
| ⑧ | 安川電機製 移動ユニット |
計算機 | MobileHIRO台車部を構成するロボット。内部には移動ユニットHWが備え付けられている。 |
| ⑨ | 移動ユニットHW | 計算機 | MobileHIRO台車部に備え付けられているPC。 |
| ⑩ | YasukawaVehicle Controller |
ソフトウェア | Choreonoidから受け取った移動計画を安川電機製移動ユニットが備えるVehicleServiceProviderのI/Fにあわせた形式に変換し、VehicleServiceに送信するソフトウェア。 |
| ⑪ | VehicleService Provider |
ソフトウェア | MobileHIRO台車部に対するHW制御指示を受け取るソフトウェア。 |
| ⑫ | HIRONXProvider | ソフトウェア | HIRO/NEXTAGEに対するHW制御指示を受け取るソフトウェア。 |
| ⑬ | 作業対象物認識 モジュール群 OpenVGR |
ソフトウェア | 把持する物体の配置をMobileHIRO頭部カメラにて認識し、Choreonoidの3Dモデル空間上に再現するために利用する。 |
本構成では、動作計画作成ソフトウェア②Choreonoidを⑦HIRO/NEXTAGEに内臓されている①VisionPCにて起動する。 使用する②Choreonoidは、基本構成と同様に、③GraspPluginと④VehiclePluginによる機能拡張が行われており、ユーザは把持計画と移動計画を作成することができる。 MobileHIROは、大きく分けて頭部⑥IEEE1394カメラ部と、双腕部である⑦HIRO/NEXTAGE部、移動台車部である⑧安川電機製移動ユニット部に分けられる。 ④VehiclePluginにより移動計画を作成したあとは、作業対象物の認識を⑬⑭OpenVGRで行い、結果を③GraspPluginにて受け取った後それに対する把持計画を作成する。⑥⑦⑧で構成されるMobileHIROはRTミドルウェア(「2.3拡張性について)にて後述)を利用して②Choreonoidと接続され通信を行うことができる。これによりユーザは作成した計画を⑥⑦⑧MobileHIRO本体に送信することができる。これにより、実際に⑥⑦⑧MobileHIROが動作する。(図 4)

データ取得コンポーネント(LRF)
概要
LRFからデータを取得するためのコンポーネントです.
ライセンス
修正BSDライセンスを適用しています.
開発バージョン
3月上旬頃公開予定
連絡先
奈良先端科学技術大学院大学 情報科学研究科
robotics-staff@is.naist.jp
〒630-0192 奈良県 生駒市 高山町 8916-5
Tel: 0743-72-5371, Fax: 0743-72-5379
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
人物追跡モジュール
概要
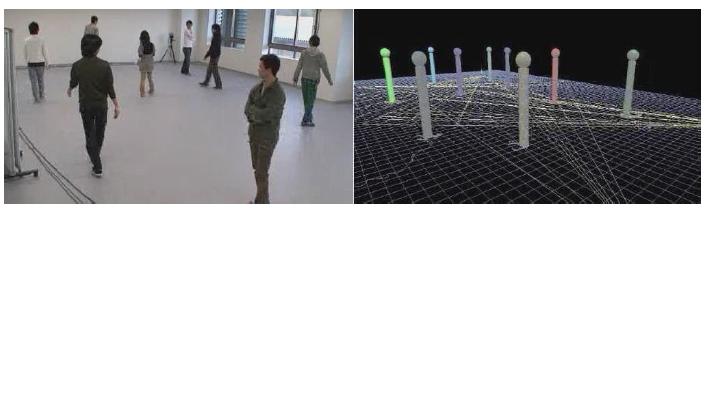
本知能モジュールは、複数のレーザレンジファインダを用いて人物追跡を行い、その結果をサービスポートで出力します。
出力する形式は九州大学で開発しているタウンマネジメントシステムと
互換性があります。
注意事項
下記ライブラリ、ドライバを使用しています。●OpenCV1.0 OpenGL
●DragonFly2 ドライバ
●Sick LMS300 ドライバ
ライセンス
本モジュールは、バイナリで提供します。ライセンスについては、下記連絡先にお問い合わせ下さい。
連絡先
九州大学大学院システム情報科学研究院情報知能工学部門 長谷川研究室 tsuji@ait.kyushu-u.ac.jp
〒819-0395 福岡県福岡市西区元岡744 ウエスト2 号館912 室
Tel :092-802-3598 Fax:092-802-3607
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 0.2 | 1.0.0 | WindowsXP | C++ | Humantrack.zip | HumanTrackManual.zip | 2011.12.13 |
アピアランスベース物体位置・姿勢推定コンポーネント
概要
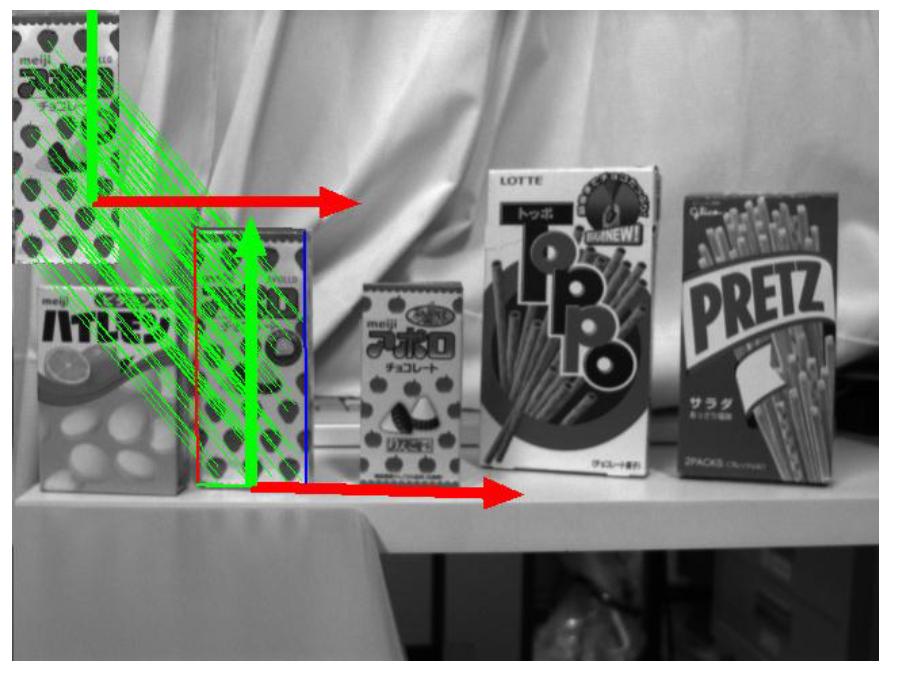
本モジュールでは,ロバストな認識が可能なSIFTアルゴリズムをGPU実装し,さらにその認識結果から対象物の位置・姿勢を推定するコンポーネントです。
本コンポーネントでは,SIFTの演算にGPUを利用し,このライブラリとして
NVIDIA社が提供するCUDAの環境を利用しております。そのため,CUDAが
動作するGPUを内蔵していることが動作条件となりますので,ご注意
ください。
知能化プロジェクト共通カメラインタフェースに対応しているため,対応して
いるカメラモジュールであれば自由に利用が可能です。
注意事項
下記ライブラリ、及びツールを使用しています。●OpenCV 2.3.1
●CUDA SDK 4.0
●CUDA toolkit 4.0
ライセンス
修正BSDライセンスを適用しています。
詳しくは、ご連絡をお願い致します。
連絡先
国立大学法人 大阪大学 大学院基礎工学研究科 k-oohara@arai-lab.sys.es.osaka-u.ac.jp
〒560-8531 大阪府豊中市待兼山町1-3
Tel: 06-6850-6368, Fax: 06-6850-6341
http://www-arailab.sys.es.osaka-u.ac.jp/CameraIF/
Download
| Ver | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 1.4 | 1.0.0 | Windows7 | C++ | ObjectSensor .zip | ObjectSensorManual.zip | 2012.01.05 |
部品ピッキング用物体認識
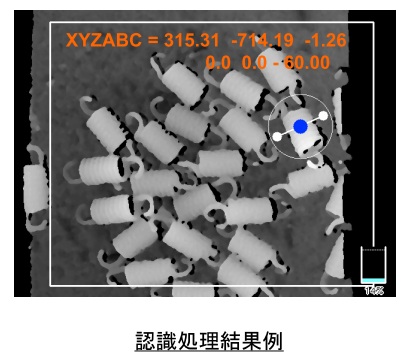
概要
アクティブパターン投光型3次元レンジファインダー(三菱電機(株)Micro3D)
センサーに対応して3次元情報及び濃淡画像情報を用いて部品ピッキングのための
物体認識処理を行うモジュールです。
ライセンス
商用利用については、実行形式で有償提供とさせて頂きます。
詳しい内容については、下記へご連絡願います。
連絡先
三菱電機株式会社
先端技術総合研究所 業務部 技術情報課
http://www.MitsubishiElectric.co.jp/corporate/randd/inquiry/index_at.html
お問い合わせ窓口)
ATC_webmaster@ra.MitsubishiElectric.co.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
オープンソース版作業対象認識モジュール群 座標系変換ツール

概要
オープンソース版作業対象認識モジュール群に付加して使用するツールです。
認識結果の座標系を変換するために利用します。
関連モジュール
オープンソース版作業対象認識モジュール群「OpenVGR」
ステレオカメラを利用し、指定された作業対象物の検出結果(3次元位置・姿勢)を
共通形式で出力するモジュール群です。
ドキュメント
はじめにお読みください
クロスマーカー検出プログラムの使い方
座標系変換行列計算プログラムの使い方
ライセンス
EPL Ver1.0
ソースコード
http://code.google.com/p/openvgr/downloads/list
連絡先
独立行政法人 産業技術総合研究所
知能システム研究部門 タスクビジョン研究グループ
〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二
email: openvgr-contact@m.aist.go.jp
音声認識モジュール
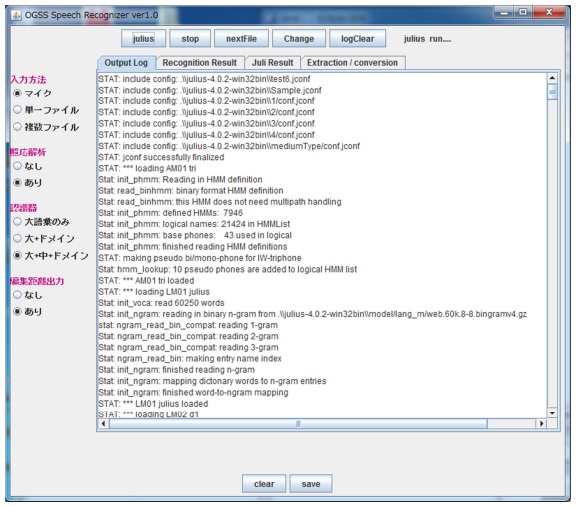
概要
音声対話のための音声認識するモジュールです。認識エンジンには、Julius を使用しています。
Windows の標準のマイク入力の音声を入力するモジュール
(例えば、OpenHRIのportaudioinput等)と接続し、認識結果を
TimedStringのデータポートから出力します。
ライセンス
EPLライセンスを適用します。 連絡先
九州工業大学情報工学研究院生命情報工学研究系ohashi@bio.kyutech.ac.jp
TEL/FAX 0948-29-7821/7801
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 2.0 | 1.0.0 | WindowsXP | Java | OGSS.2.0.zip | OGSS_doc.zip | 2012.01.24 |
ステレオ楕円画像認識モジュール
概要
本コンポーネントは、共通Sense I/Fを備えた画像認識コンポーネントで
ステレオカメラで物体(皿やコップ)の円弧(楕円)を検出し
予め登録した半径データと照合して、その位置・姿勢を算出するものである。
同時に複数の楕円を認識でき、算出した位置・姿勢をワイヤーフレームで
実写画像に重畳して表示することができる。
ライセンス
バイナリーを無償提供とさせて頂きます。
詳しい内容については、下記へご連絡願います。
連絡先
株式会社 東芝
研究開発センター 機械・システムラボラトリー
〒212-8582 川崎市幸区小向東芝町1
Tel :044-549-2193
Email:atsushi.sugahara@toshiba.co.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
Download