作業知能モジュール群
MCM4302向けカメラ制御RTC

概要
このコンポーネントは、マイクロビジョン社製USBカメラ(MCM-4302)1台を制御する機能を有する。
ライセンス
Eclipse Public License v1.0を適用しています。
連絡先
IDEC株式会社
rtc_support@idec.co.jp
Download
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。
http://code.google.com/p/idec-rtcs/
テンプレートマッチングコンポーネント
概要
テンプレートマッチングを用いた対象物の位置・姿勢推定のためのアルゴリズムです. pythonスクリプトから制御することを想定しております. OpenMPを利用して並列化による高速化も実現しています.
ライセンス
修正BSDライセンスを適用しています.
開発バージョン
3月上旬頃公開予定
連絡先
奈良先端科学技術大学院大学 情報科学研究科
robotics-staff@is.naist.jp
〒630-0192 奈良県 生駒市 高山町 8916-5
Tel: 0743-72-5371, Fax: 0743-72-5379
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
中位動作計画モジュール
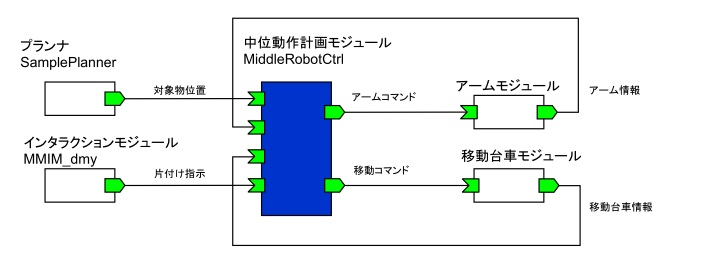
概要
カメラなどで取得した対象物の位置情報を入力すると
アームの目標位置列を順に出力するモジュール。
ライセンス
EPL
詳しい内容については、下記へご連絡願います。
連絡先
株式会社 東芝
研究開発センター 機械・システムラボラトリー
〒212-8582 川崎市幸区小向東芝町1
Tel :044-549-2193
Email:junichiro.ohga@toshiba.co.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 1.0 | 1.0.0 | Ubuntu | C++ | MiddleRobotCtrl.zip | MiddleRobotCtrl_Doc2.zip | 2011.11.04 |
ロボットハンド(RH707)制御RTC

概要
シュンク・ジャパン(旧高野ベアリング)社製電動ハンドRH707 を
制御するRTC(動作確認用RTC付き)です。
注意点
下記ライブラリを使用しています。
●ライフロボティクス社製RH707ハンド用コントローラRH700C3制御
ライブラリ(商用)
ライセンス
EPLライセンスを適用しています。
連絡先
富士ソフト株式会社 ロボット事業グループ 商品開発ユニットE-Mail :tnninomi@fsi.co.jp
Download
| Ver. | OS | RTM | 言語 | モジュール本体 | ドキュメント | Date |
| 2.0 | WindowsXP | 1.0.0 | C++ | HandCtrl_1.0.zip | HandCtrl_1.0_doc.zip | 2011.07.07 |
| 1.0 | Debian | 0.4.x | C++ | rh707_doc.zip | hand_ctrl.tar_.zip | 2010.08.10 |
デモ画像
画像データの表示RTC
概要
EPBM形式画像データをディスプレイに表示するモジュールです。
関連モジュール
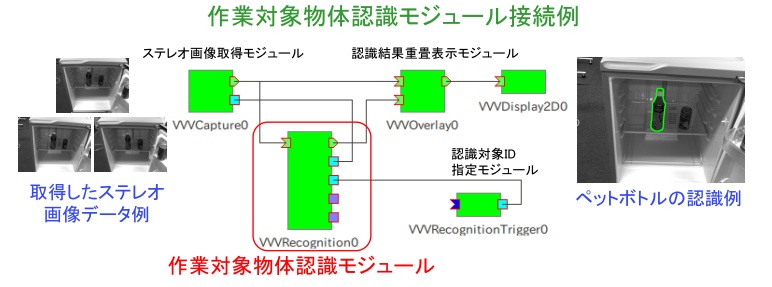
作業対象物認識モジュール群
ステレオ画像取得RTC
認識結果の重畳表示RTC
注意事項
利用に際しては高機能3次元視覚システムVVVのキャリブレーションデータが必要になります。
詳細に関しましては下記へお問い合わせ下さい。
ライセンス
実行ファイルを有償でご提供させて頂きます。
詳しくは、下記へご相談ください。
連絡先
独立行政法人 産業技術総合研究所
知能システム研究部門 タスクビジョン研究グループ
〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二
email:irtsp-vvv@m.aist.go.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
Download
| Ver. | RTM | OS | 言語 | ドキュメント | Date |
| 0.9 | 1.0.0 | Ubuntu | C++ | VVVRecognition.zip | 2010.02.15 |
事前トレイ検査RTC
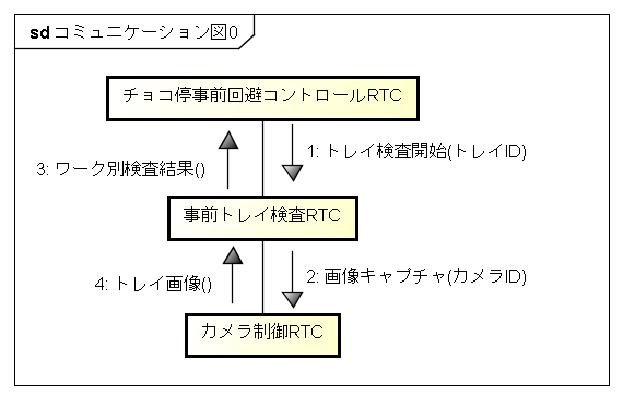
概要
本RTコンポーネントは、ロボット制御セル生産システムにおいて、生産動作
中に、部品供給トレイの各ワーク状態を検査し、位置姿勢の正常/異常を
判定する。&
注意事項
ライセンス
Eclipse Public License v1.0を適用しています。
連絡先
IDEC株式会社
rtc_support@idec.co.jp
Download
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。
http://code.google.com/p/idec-rtcs/
3DMGX1 RTC(MicroStrain社製 3DMGX1)
概要
本RTC は、OpenRTM-aist-0.4.2(C++)を利用することで、小型3軸角度センサをRTC 化したものであり、MicroStrain社製の小型3軸
角度センサである、以下の製品に対応しています。
・3DM-GX1(以降、3DMGX1 センサ)
ライセンス
修正BSDライセンスを適用しています。
詳しくは、ドキュメントに同梱の"license.pdf"をご覧ください。
連絡先
和歌山大学 システム工学部 情報通信システム学科
ntakayuk@sys.wakayama-u.ac.jp
〒640-8510 和歌山県和歌山市栄谷930
URL: http://www.sys.wakayama-u.ac.jp/~ntakayuk
Download
| Ver | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| Rev.4 | 0.4.x | Ubuntu | C++ | m3DMGX1.zip | 3DMGX1センサRTCドキュメント.zip | 2010.09.03 |
人物追跡モジュール
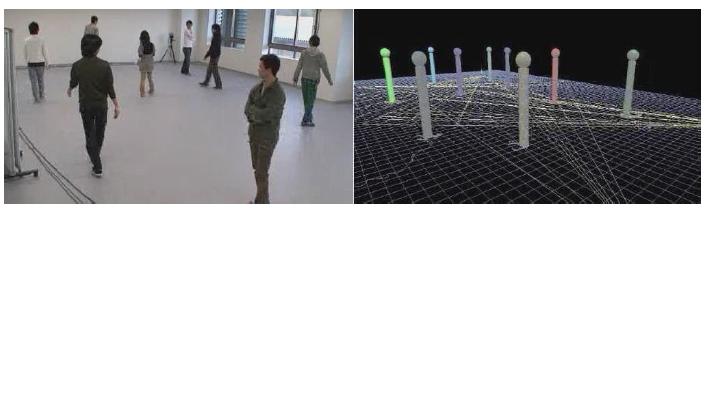
概要
本知能モジュールは、複数のレーザレンジファインダを用いて人物追跡を行い、その結果をサービスポートで出力します。
出力する形式は九州大学で開発しているタウンマネジメントシステムと
互換性があります。
注意事項
下記ライブラリ、ドライバを使用しています。●OpenCV1.0 OpenGL
●DragonFly2 ドライバ
●Sick LMS300 ドライバ
ライセンス
本モジュールは、バイナリで提供します。ライセンスについては、下記連絡先にお問い合わせ下さい。
連絡先
九州大学大学院システム情報科学研究院情報知能工学部門 長谷川研究室 tsuji@ait.kyushu-u.ac.jp
〒819-0395 福岡県福岡市西区元岡744 ウエスト2 号館912 室
Tel :092-802-3598 Fax:092-802-3607
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 0.2 | 1.0.0 | WindowsXP | C++ | Humantrack.zip | HumanTrackManual.zip | 2011.12.13 |
ステレオ楕円画像認識モジュール
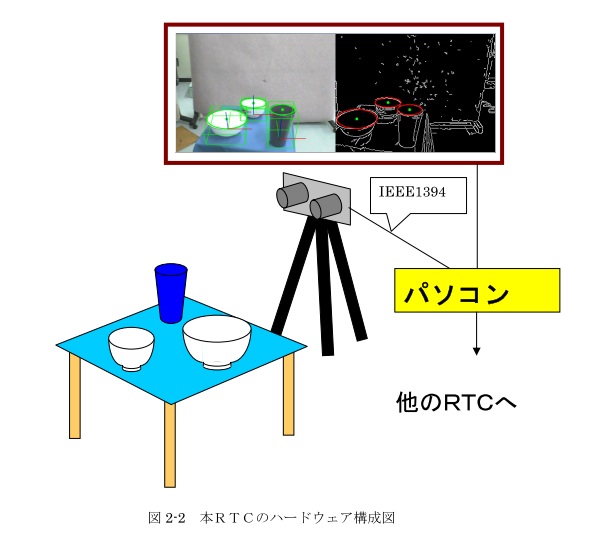
概要
本コンポーネントは、共通Sense I/Fを備えた画像認識コンポーネントで
ステレオカメラで物体(皿やコップ)の円弧(楕円)を検出し
予め登録した半径データと照合して、その位置・姿勢を算出するものである。
同時に複数の楕円を認識でき、算出した位置・姿勢をワイヤーフレームで
実写画像に重畳して表示することができる。
ライセンス
バイナリーを無償提供とさせて頂きます。
詳しい内容については、下記へご連絡願います。
連絡先
株式会社 東芝
研究開発センター 機械・システムラボラトリー
〒212-8582 川崎市幸区小向東芝町1
Tel :044-549-2193
Email:atsushi.sugahara@toshiba.co.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 1.0 | 1.0.0 | Ubuntu | C++ | StereoEllipse.zip | StereoEllipseDetection_Doc2.zip | 2011.10.20 |
三菱重工製PA10ロボットコントローラ制御
概要
このコンポーネントは、三菱重工製PA10向けのロボットコントローラ制御用RTCです。ACT共通インタフェース対応版です。ライセンス
Eclipse Public License v1.0を適用しています。
連絡先
IDEC株式会社
rtc_support@idec.co.jp
Download
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。
http://code.google.com/p/idec-rtcs/